GNSS – Technologie et conformité
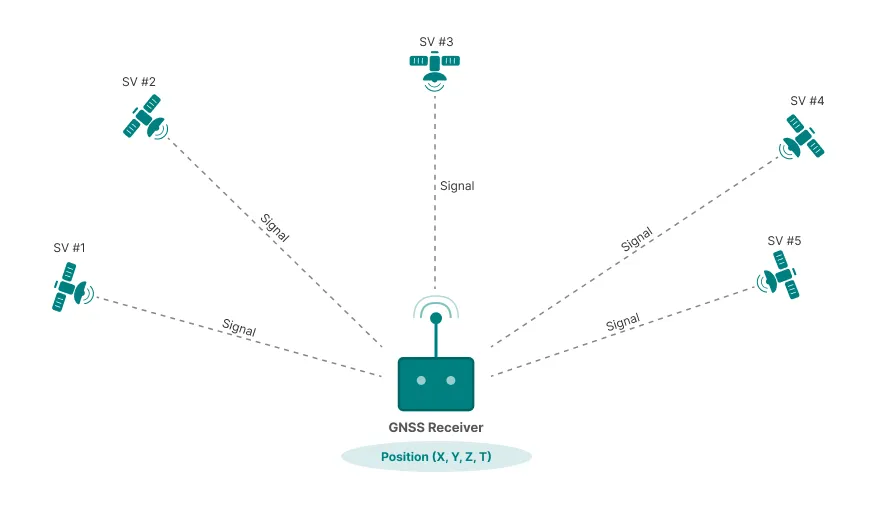
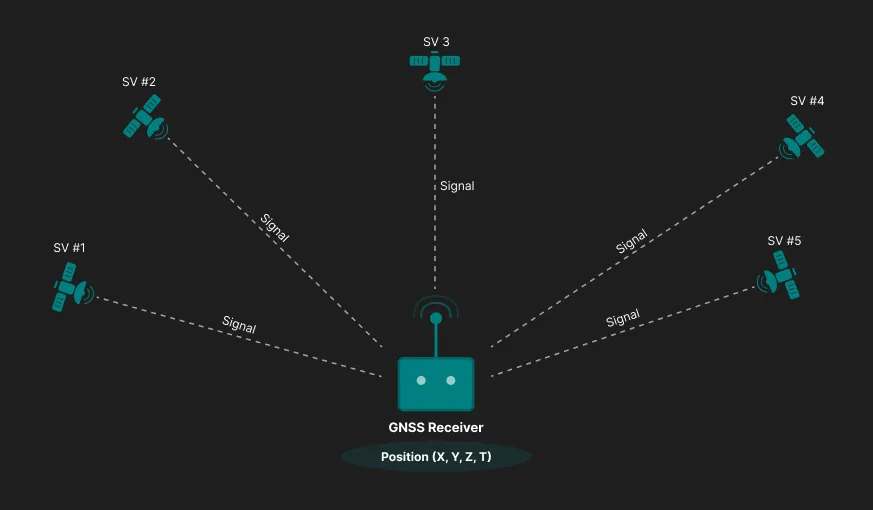
Les systèmes mondiaux de navigation par satellite (GNSS) permettent le positionnement, la navigation et le chronométrage (PNT) basés sur satellite en recevant des signaux de plusieurs constellations de satellites mondiales et régionales dans la bande L.
En tant que technologie de récepteur passif, le GNSS n'émet pas de signaux radio mais repose sur la réception précise des signaux, leur traitement et leur intégration dans l'appareil hôte. Pour les fabricants, garantir des performances GNSS fiables et un accès mondial au marché nécessite une validation reproductible des performances et le respect des exigences réglementaires régionales et spécifiques aux applications.
Vous travaillez sur des essais de récepteur GNSS pour votre produit ?
Nous prenons en charge les essais de récepteur GNSS grâce à la simulation de signaux, à l'évaluation des performances et à l'évaluation de la conformité pour les applications automobiles / eCall et IoT / suivi d'actifs.
Points clés
Les récepteurs GNSS reposent sur le positionnement et la synchronisation par satellite utilisant des signaux extrêmement faibles (environ −130 dBm), ce qui rend la conception de l'antenne et le traitement du signal critiques pour un fonctionnement fiable.
Les performances du récepteur sont définies par la sensibilité, le temps d'acquisition initial (TTFF) et la précision du positionnement dans des conditions d'essai contrôlées et reproductibles.
Les essais basés sur simulateur permettent une évaluation reproductible des performances GNSS, incluant la sensibilité, le TTFF, la dynamique et la résistance aux interférences, au-delà de ce que permettent les essais en ciel réel.
L'accès au marché mondial dépend du respect des cadres réglementaires régionaux et des mandats spécifiques à l'application, tels que la norme ETSI EN 303 413, le support Galileo pour l'eCall dans l'UE ou les exigences NavIC en Inde.
Aperçu des technologies
Les récepteurs du Système mondial de navigation par satellite traitent les signaux émis par des satellites en orbite terrestre moyenne à une altitude d'environ 20 000 km. Chaque système GNSS gère sa propre constellation de satellites, généralement composée de 24 à 35 satellites, et diffuse des signaux de synchronisation codés sur des bandes de fréquence définies.
Les récepteurs modernes prennent en charge le fonctionnement multi-constellations, permettant l'utilisation simultanée de signaux provenant de plusieurs systèmes pour améliorer la disponibilité et les performances globales de positionnement.
Positionnement par GNSS
Les sections suivantes offrent un aperçu des principales constellations GNSS mondiales, des bandes de fréquences et des caractéristiques techniques clés.
Aperçu mondial des systèmes GNSS
| Système | Détails |
|---|---|
| GPS (Navstar) |
Opérateur / Région : États-Unis (US Space Force) Signaux principaux : L1, L5 Caractéristiques clés : Système GNSS mondial le plus ancien ; système de référence mondial ; services civils et militaires ; large support des appareils |
| Galileo |
Opérateur / Région : Union européenne Signaux principaux : E1, E5 Caractéristiques clés : Système axé sur le civil ; service ouvert haute précision ; obligatoire pour les applications eCall européennes |
| GLONASS |
Opérateur / Région : Fédération de Russie Signaux principaux : G1, G2 Caractéristiques clés : Couverture mondiale ; accès multiple par répartition en fréquence (FDMA) ; souvent combiné avec le GPS |
| BeiDou |
Opérateur / Région : Chine Signaux principaux : B1, B2 Caractéristiques clés : Système mondial avec augmentation régionale ; forte couverture Asie-Pacifique ; adoption internationale croissante |
| NavIC (IRNSS) |
Opérateur / Région : Inde Signaux principaux : L5, bande S Caractéristiques clés : Système régional ; obligatoire pour certaines applications du marché indien ; complète les GNSS mondiaux |
| Système | Opérateur / Région | Signaux principaux (aperçu) | Caractéristiques clés |
|---|---|---|---|
| GPS (Navstar) | États-Unis (US Space Force) | L1, L5 | Système GNSS mondial le plus ancien ; système de référence mondial ; services civils et militaires ; large support des appareils |
| Galileo | Union européenne | E1, E5 | Système axé sur le civil ; service ouvert haute précision ; obligatoire pour les applications eCall européennes |
| GLONASS | Fédération de Russie | G1, G2 | Couverture mondiale ; accès multiple par répartition en fréquence (FDMA) ; souvent combiné avec le GPS |
| BeiDou | Chine | B1, B2 | Système mondial avec augmentation régionale ; forte couverture Asie-Pacifique ; adoption internationale croissante |
| NavIC (IRNSS) | Inde | L5, bande S | Système régional ; obligatoire pour certaines applications du marché indien ; complète les GNSS mondiaux |
Signaux et bandes de fréquences
Les récepteurs GNSS fonctionnent dans la bande L et traitent des signaux à spectre étalé transmis sur des fréquences porteuses bien définies. Ces signaux transportent des informations de synchronisation précises permettant au récepteur de calculer les pseudodistances vers plusieurs satellites. Le choix des bandes de fréquences affecte directement les performances du récepteur, sa robustesse et sa pertinence réglementaire.
Bandes de fréquence GNSS courantes
| Band / Signal | Détails |
|---|---|
| L1 / E1 |
Fréquence approximative : ~1575 MHz Utilisé par : GPS, Galileo, QZSS Relevance technique : Bande GNSS civile primaire ; prise en charge la plus large des appareils ; référence pour le positionnement |
| L2 |
Fréquence approximative : ~1227 MHz Utilisé par : GPS, GLONASS Relevance technique : Fréquence supplémentaire utilisée dans les récepteurs multi-bandes |
| L5 / E5a |
Fréquence approximative : ~1176 MHz Utilisé par : GPS, Galileo, NavIC Relevance technique : Robustesse du signal accrue ; utilisée dans les applications liées à la sécurité et avancées |
| E5b / B2 |
Fréquence approximative : ~1207 MHz Utilisé par : Galileo, BeiDou Relevance technique : Bande de précision complémentaire supportant le fonctionnement à double fréquence |
| B1 |
Fréquence approximative : ~1561 MHz Utilisé par : BeiDou Relevance technique : Bande de service BeiDou avec pertinence régionale et mondiale |
| S-band |
Fréquence approximative : ~2492 MHz Utilisé par : NavIC Relevance technique : Bande d'augmentation régionale avec pertinence pour le marché indien |
| Band / Signal | Fréquence approximative | Utilisé par (exemples) | Relevance technique |
|---|---|---|---|
| L1 / E1 | ~1575 MHz | GPS, Galileo, QZSS | Bande GNSS civile primaire ; prise en charge la plus large des appareils ; référence pour le positionnement |
| L2 | ~1227 MHz | GPS, GLONASS | Fréquence supplémentaire utilisée dans les récepteurs multi-bandes |
| L5 / E5a | ~1176 MHz | GPS, Galileo, NavIC | Robustesse du signal accrue ; utilisée dans les applications liées à la sécurité et avancées |
| E5b / B2 | ~1207 MHz | Galileo, BeiDou | Bande de précision complémentaire supportant le fonctionnement à double fréquence |
| B1 | ~1561 MHz | BeiDou | Bande de service BeiDou avec pertinence régionale et mondiale |
| S-band | ~2492 MHz | NavIC | Bande d'augmentation régionale avec pertinence pour le marché indien |
Fonctionnement à double fréquence
Les récepteurs GNSS modernes prennent de plus en plus en charge le fonctionnement à double fréquence, combinant généralement L1 ou E1 avec les signaux L5 ou E5. En comparant la propagation du signal sur deux fréquences, les effets de retard ionosphérique peuvent être considérablement réduits, ce qui améliore la robustesse et la fiabilité du positionnement, en particulier dans des environnements difficiles.
Architecture du récepteur GNSS
Aperçu rapide
- Réception du signal : Capture des signaux satellites faibles (généralement −130 dBm) et les amplifie pour le traitement
- Traitement numérique : Acquiert et suit les codes satellites pour extraire les informations de temporisation
- Calcul de position : Calcule la position 3D à partir d'au moins quatre signaux satellites
- Prise en charge multi-systèmes : Les récepteurs modernes traitent simultanément GPS, Galileo, GLONASS et BeiDou
Conversion vers le bas et numérisation
Après filtrage et amplification, les signaux reçus sont convertis vers le bas vers une fréquence intermédiaire ou bande de base et numérisés. Cette étape prépare le signal pour la corrélation et le suivi dans le domaine numérique.
Les récepteurs GNSS modernes utilisent des convertisseurs analogique-numérique (ADC) pour numériser les signaux à des taux suffisants pour capturer la bande passante d'étalement (généralement 2–40 MHz selon le type de signal). Les signaux numérisés sont ensuite traités par des moteurs de corrélation pour extraire les données de temporisation et de navigation.
Acquisition du signal
Pendant l'acquisition, le récepteur recherche les satellites visibles en corrélant les signaux entrants avec des codes d'étalement GNSS connus. Ce processus identifie les signaux satellites et fournit des estimations grossières de la phase de code et de la fréquence Doppler.
Le temps nécessaire pour obtenir la première position (TTFF – Time To First Fix) dépend de la présence de données d'éphémérides valides et d'informations de position récentes dans le récepteur. Les scénarios de démarrage à froid (sans données préalables) nécessitent généralement 30–60 secondes, tandis que les démarrages à chaud ou tièdes peuvent obtenir des positions en quelques secondes.
Suivi du signal
Une fois acquis, les boucles de suivi affinent continuellement les estimations de temporisation et de fréquence. Un suivi stable est essentiel pour maintenir la liaison avec les satellites et soutenir des mesures de pseudodistance précises dans des conditions de signal variables.
Les boucles de suivi comprennent des boucles à verrouillage de délai (DLL) pour le suivi de code et des boucles à verrouillage de phase (PLL) ou des boucles à verrouillage de fréquence (FLL) pour le suivi de porteuse. Ces boucles doivent équilibrer les performances de bruit avec la réponse dynamique pour maintenir un fonctionnement stable lors du déplacement du récepteur ou de l'évanouissement du signal.
Solution de navigation
Le moteur de navigation calcule la position, la vitesse et l'heure sur la base des mesures de pseudodistance provenant de plusieurs satellites. Au moins quatre satellites sont nécessaires pour résoudre la position tridimensionnelle et le décalage de l'horloge du récepteur.
Les pseudodistances représentent la distance mesurée entre le satellite et le récepteur, incluant l'erreur d'horloge du récepteur. Le moteur de navigation résout un système d'équations reliant les positions des satellites, les pseudodistances et la position du récepteur en utilisant des algorithmes itératifs ou des techniques de filtrage de Kalman.
La précision de la position dépend de la géométrie des satellites, des délais atmosphériques, de la propagation par trajets multiples et du bruit du récepteur. Les récepteurs typiques à fréquence unique atteignent une précision de 3–5 mètres dans des conditions de ciel dégagé. Les récepteurs avancés utilisant une opération double fréquence et plusieurs constellations peuvent améliorer considérablement la précision et la fiabilité du positionnement.
Fonctionnalités avancées
Traitement multi-constellations
Les récepteurs GNSS modernes traitent simultanément les signaux de plusieurs systèmes satellites, améliorant la disponibilité des satellites et la robustesse du positionnement. En combinant les signaux GPS, Galileo, GLONASS et BeiDou, les récepteurs augmentent le nombre de satellites visibles, en particulier dans des environnements difficiles tels que les canyons urbains ou sous le feuillage.
Le fonctionnement multi-constellations améliore également la résistance au blocage localisé du signal et fournit une redondance si un système subit des interruptions de service. L'utilisation de plusieurs constellations est de plus en plus obligatoire pour certaines applications, telles que les systèmes eCall européens qui nécessitent une prise en charge de Galileo.
Fonctionnement double fréquence
Les récepteurs double fréquence traitent les signaux sur deux bandes de fréquences (généralement L1/E1 et L5/E5) pour éliminer les erreurs de délai ionosphérique. En comparant les temps de propagation du signal sur différentes fréquences, le récepteur peut calculer et supprimer la distorsion ionosphérique, améliorant considérablement la précision de la position sans nécessiter de données de correction externes.
Cette capacité est particulièrement précieuse dans des environnements à forte activité ionosphérique ou pour des applications nécessitant une précision constante quelles que soient les conditions atmosphériques.
Considérations de coexistence et d'intégration
Les récepteurs GNSS sont couramment intégrés dans des appareils contenant également des radios cellulaires, Wi-Fi, Bluetooth ou UWB. Une conception RF soignée est requise pour éviter la désensibilisation causée par des émetteurs à proximité, en particulier lorsque les antennes GNSS et les composants front-end sont placés à proximité immédiate de radios actives.
Les principaux défis d'intégration incluent :
- Interférences hors bande : Les émetteurs puissants dans les bandes de fréquences adjacentes (par exemple, la bande LTE 1 près de 2100 MHz) peuvent générer des harmoniques ou des produits d'intermodulation qui tombent dans les bandes GNSS
- Saturation du front-end : Les transmissions haute puissance peuvent saturer le LNA GNSS, réduisant la sensibilité même lorsque le signal perturbateur est hors bande
- Couplage d'antenne : Une isolation inadéquate entre l'antenne GNSS et les autres antennes radio peut entraîner un couplage direct de signaux perturbateurs
Les stratégies d'atténuation des interférences incluent la séparation spatiale des antennes, la planification des fréquences, l'effacement dans le domaine temporel pendant les rafales de transmission et le filtrage adaptatif dans le domaine numérique. Les essais de performance de coexistence sont essentiels pour garantir un fonctionnement GNSS fiable dans des scénarios de déploiement réels.
→ La validation des performances et les essais de conformité abordent ces défis d'intégration grâce à des scénarios de mesure contrôlés. Voir essais des récepteurs GNSS pour des directives détaillées sur les méthodes d'évaluation et les exigences réglementaires.
Paramètres de performance et métriques d'essai
La performance d'un récepteur GNSS est définie par la fiabilité avec laquelle les signaux satellites peuvent être acquis, suivis et convertis en informations précises de position, de vitesse et de temps dans des conditions réelles. En raison des niveaux de signal extrêmement faibles impliqués, la performance doit être évaluée à l'aide de métriques bien définies et reproductibles.
Les paramètres suivants sont couramment utilisés pour caractériser la performance des récepteurs GNSS dans des applications telles que les systèmes automobiles, les dispositifs de suivi IoT et les fonctions de positionnement liées à la sécurité.
Sensibilité
La sensibilité décrit le niveau de puissance de signal minimum auquel un récepteur GNSS peut acquérir ou suivre avec succès des signaux satellites.
Deux métriques de sensibilité sont généralement distinguées :
Sensibilité d'acquisition
Le niveau de signal le plus bas auquel le récepteur peut détecter et acquérir un signal satellite et obtenir une première position.Sensibilité de suivi
Le niveau de signal le plus bas auquel le récepteur peut maintenir la verrouillage sur un signal satellite déjà acquis.
La sensibilité de suivi est généralement plusieurs décibels meilleure que la sensibilité d'acquisition et est critique pour le fonctionnement dans des environnements avec atténuation du signal, tels que les canyons urbains, les emplacements adjacents à l'intérieur ou sous la végétation.
Temps jusqu'à la première position (TTFF)
Le temps jusqu'à la première position décrit le temps nécessaire à un récepteur GNSS pour calculer sa première solution de position valide après la mise sous tension ou la réinitialisation.
Le TTFF dépend fortement de l'état du récepteur et des données d'assistance disponibles :
Démarrage à froid
Aucune almanach, éphéméride ou information de position précédente valide n'est disponible. Le TTFF typique varie de 30 à 60 secondes.Démarrage à tiède
Les données d'almanach et la position approximative sont disponibles, mais les données d'éphémérides sont obsolètes. Le TTFF est généralement réduit à quelques secondes.Démarrage à chaud
Les éphémérides valides et les informations de position récentes sont disponibles. Les positions sont généralement obtenues en une à deux secondes.
Le TTFF est un indicateur clé de performance pour l'expérience utilisateur et pour les applications nécessitant un positionnement rapide après un cycle d'alimentation.
Précision de position
La précision de position décrit l'écart entre la position rapportée par le récepteur et la position réelle. Elle est couramment exprimée comme une erreur horizontale et verticale dans des conditions d'essai définies.
La précision est influencée par plusieurs facteurs :
Géométrie des satellites (dilution de la précision)
Retards atmosphériques (ionosphériques et troposphériques)
Propagation par trajets multiples
Bruit du récepteur et algorithmes de traitement
Dans des conditions de ciel dégagé, les récepteurs à fréquence unique atteignent généralement des précisions horizontales de l'ordre de quelques mètres. Les récepteurs multi-constellations et à double fréquence peuvent améliorer considérablement la précision et la robustesse, en particulier dans des environnements difficiles.
Robustesse et résilience aux interférences
La robustesse décrit la capacité du récepteur à maintenir la performance de positionnement en présence d'altérations du signal.
Les aspects pertinents incluent :
Résistance aux interférences dans la bande et hors bande
Tolérance aux émetteurs radio adjacents au sein du même dispositif
Stabilité dans des conditions dynamiques telles que le mouvement du véhicule ou l'évanouissement du signal
La résilience aux interférences est particulièrement importante pour les dispositifs intégrés combinant GNSS avec des technologies cellulaires, Wi-Fi ou d'autres technologies sans fil.
Méthodes d'essais et de validation
Les essais de récepteurs GNSS visent à vérifier les paramètres de performance dans des conditions contrôlées et reproductibles. Étant donné que les signaux GNSS sont extrêmement faibles et que les influences environnementales ne peuvent être maîtrisées dans des scénarios réels, les essais en laboratoire sont essentiels pour une validation fiable des performances et une évaluation de la conformité.
Les méthodes d'essais sont sélectionnées en fonction du stade de développement, du contexte d'application et des exigences réglementaires.
Essais basés sur simulateur
Les simulateurs GNSS génèrent des signaux satellites réalistes et permettent un contrôle précis des paramètres de signal, de la géométrie des satellites et des conditions environnementales. Cela permet des essais reproductibles impossibles à réaliser avec des mesures en ciel réel.
Les scénarios d'essais typiques basés sur simulateur incluent :
Visibilité et géométrie des satellites contrôlées
Niveaux de puissance de signal ajustables pour les essais de sensibilité
Évaluation du TTFF pour les démarrages à froid, à tiède et à chaud
Scénarios dynamiques avec profils de mouvement configurables
Fonctionnement multi-constellations et multi-fréquences
Les essais sur simulateur constituent la méthode privilégiée pour la caractérisation des performances, les essais de régression et les mesures liées à la certification.
Essais en ciel réel
Les essais en ciel réel utilisent de vrais signaux satellites reçus via une antenne dans un environnement extérieur. Ils offrent des conditions d'exploitation réalistes mais manquent de reproductibilité et de contrôle.
Les essais en ciel réel sont généralement utilisés pour :
La vérification fonctionnelle durant le développement
La validation sur le terrain des appareils intégrés
L'évaluation de l'expérience utilisateur
En raison de variables incontrôlées telles que la géométrie des satellites, les interférences et la météo, les essais en ciel réel ne conviennent pas comme seule base pour la validation des performances ou la preuve de conformité.
Évaluation de la sensibilité et du TTFF
Les mesures de sensibilité et de TTFF sont couramment effectuées à l'aide de simulateurs GNSS pour garantir des résultats cohérents et reproductibles.
Les approches typiques incluent :
Atténuation progressive du signal pour déterminer les seuils d'acquisition et de suivi
Conditions de démarrage définies pour les mesures de TTFF à froid, à tiède et à chaud
Vérification sur les constellations et bandes de fréquence prises en charge
Ces mesures soutiennent directement les paramètres de performance définis dans la section précédente.
Essais d'interférence et de robustesse
Les essais de robustesse évaluent la performance du récepteur en présence d'altérations de signal et de sources d'interférence.
Les aspects d'essais pertinents incluent :
Injection d'interférences dans la bande et hors bande
Scénarios de coexistence d'émetteurs adjacents
Simulation de blocage et d'évanouissement du signal
Essais de stress dynamique sous mouvement et variation de puissance
Ces essais sont particulièrement importants pour les appareils intégrant GNSS avec des technologies cellulaires, Wi-Fi ou d'autres technologies sans fil.
Essais orientés conformité
Pour certaines applications et marchés, les récepteurs GNSS doivent démontrer la conformité aux exigences de performance et d'émission définies.
Les exemples incluent :
Validation des performances selon ETSI EN 303 413 pour les marchés européens
Vérification du blocage du récepteur et des émissions parasites
Documentation des conditions d'essai, de l'incertitude et de la répétabilité
Les essais orientés conformité s'appuient sur des mesures basées sur simulateur et nécessitent des procédures d'essai traçables et bien documentées.
Exigences réglementaires et spécifiques à l'application
Les récepteurs GNSS sont des dispositifs radio passifs qui n'émettent pas de signaux radio eux-mêmes. Par conséquent, ils ne nécessitent généralement pas de licences de fréquence individuelles ou d'approbations de type radio sur la plupart des marchés.
Cependant, les récepteurs GNSS restent soumis aux cadres réglementaires régionaux couvrant les équipements radio, la compatibilité électromagnétique et les exigences spécifiques à l'application. De plus, certains marchés imposent le support de systèmes satellitaires spécifiques pour des cas d'usage liés à la sécurité ou réglementés au niveau national.
L'aperçu suivant résume les principales considérations réglementaires pertinentes pour l'intégration des récepteurs GNSS et l'accès aux marchés mondiaux.
| Région | Détails |
|---|---|
| UE |
Statut réglementaire : Les récepteurs GNSS sont considérés comme des équipements radioélectriques au sens de la directive Équipements radioélectriques (RED). Aucune licence radio individuelle n'est requise, mais la conformité CE est obligatoire, incluant une utilisation efficace du spectre et la conformité CEM (par exemple ETSI EN 303 413). Restrictions d'utilisation GNSS : Aucune restriction sur l'utilisation GNSS ; tous les principaux systèmes peuvent être reçus. Exigences spécifiques à l'application : Support Galileo obligatoire pour les systèmes eCall dans les véhicules ; importance croissante de Galileo pour les services d'urgence (par exemple E112/AML). |
| USA |
Statut réglementaire : Les récepteurs GNSS passifs ne nécessitent pas de certification FCC s'ils n'émettent pas intentionnellement. Les appareils doivent respecter les limites de la FCC Part 15 pour les rayonnements involontaires. Restrictions d'utilisation GNSS : La réception GPS et Galileo est explicitement autorisée. La réception GLONASS et BeiDou est actuellement tolérée ; aucune interdiction formelle n'existe. Exigences spécifiques à l'application : Aucune exigence multi-GNSS obligatoire pour les appareils grand public ; l'accent réglementaire est mis sur les émissions et les interférences. |
| Canada |
Statut réglementaire : Similaire aux États-Unis : aucune approbation radio spécifique n'est requise pour les récepteurs GNSS passifs. Les appareils doivent respecter les exigences générales de CEM (ICES-003). Restrictions d'utilisation GNSS : Aucune restriction sur l'utilisation de systèmes GNSS étrangers. Exigences spécifiques à l'application : Aucune exigence de constellation obligatoire ; le multi-GNSS est couramment utilisé. |
| Japon |
Statut réglementaire : Les récepteurs GNSS purs ne nécessitent pas de certification radio (Giteki). Le GNSS est traité comme une réception passive. Restrictions d'utilisation GNSS : Aucune restriction sur l'utilisation GNSS ; les systèmes étrangers sont autorisés. Exigences spécifiques à l'application : Le système régional QZSS est largement pris en charge et couramment utilisé en plus du GPS et d'autres GNSS. |
| Chine |
Statut réglementaire : Les récepteurs GNSS ne nécessitent pas de licence radio dédiée. La conformité CEM générale s'applique. Restrictions d'utilisation GNSS : Aucune interdiction formelle de la réception GPS, Galileo ou GLONASS. Exigences spécifiques à l'application : La compatibilité BeiDou est fortement encouragée et peut être requise dans les applications du secteur public ou liées au gouvernement. |
| Russie |
Statut réglementaire : Aucune licence radio séparée n'est requise pour les récepteurs GNSS. L'accès au marché nécessite généralement la conformité EAC pour l'appareil dans son ensemble. Restrictions d'utilisation GNSS : Aucune restriction sur l'utilisation GNSS. Exigences spécifiques à l'application : Support GLONASS obligatoire pour les appareils de navigation vendus en Russie ; requis pour des systèmes tels que ERA-GLONASS. |
| Inde |
Statut réglementaire : Aucune approbation radio individuelle n'est requise pour les récepteurs GNSS. Les exigences générales de CEM s'appliquent. Restrictions d'utilisation GNSS : Aucune restriction sur les systèmes GNSS étrangers. Exigences spécifiques à l'application : Le support NavIC est de plus en plus obligatoire, y compris des exigences annoncées pour les smartphones et certaines applications de navigation. |
| Autres marchés |
Statut réglementaire : Les récepteurs GNSS sont généralement traités comme des appareils radio passifs et ne nécessitent pas de licence individuelle. Restrictions d'utilisation GNSS : Utilisation GNSS généralement sans restriction. Exigences spécifiques à l'application : Les systèmes locaux peuvent être promus ; les réglementations générales de CEM et de sécurité des produits s'appliquent. |
| Région | Statut réglementaire des récepteurs GNSS | Restrictions d'utilisation GNSS | Exigences spécifiques à l'application |
|---|---|---|---|
| UE | Les récepteurs GNSS sont considérés comme des équipements radioélectriques au sens de la directive Équipements radioélectriques (RED). Aucune licence radio individuelle n'est requise, mais la conformité CE est obligatoire, incluant une utilisation efficace du spectre et la conformité CEM (par exemple ETSI EN 303 413). | Aucune restriction sur l'utilisation GNSS ; tous les principaux systèmes peuvent être reçus. | Support Galileo obligatoire pour les systèmes eCall dans les véhicules ; importance croissante de Galileo pour les services d'urgence (par exemple E112/AML). |
| USA | Les récepteurs GNSS passifs ne nécessitent pas de certification FCC s'ils n'émettent pas intentionnellement. Les appareils doivent respecter les limites de la FCC Part 15 pour les rayonnements involontaires. | La réception GPS et Galileo est explicitement autorisée. La réception GLONASS et BeiDou est actuellement tolérée ; aucune interdiction formelle n'existe. | Aucune exigence multi-GNSS obligatoire pour les appareils grand public ; l'accent réglementaire est mis sur les émissions et les interférences. |
| Canada | Similaire aux États-Unis : aucune approbation radio spécifique n'est requise pour les récepteurs GNSS passifs. Les appareils doivent respecter les exigences générales de CEM (ICES-003). | Aucune restriction sur l'utilisation de systèmes GNSS étrangers. | Aucune exigence de constellation obligatoire ; le multi-GNSS est couramment utilisé. |
| Japon | Les récepteurs GNSS purs ne nécessitent pas de certification radio (Giteki). Le GNSS est traité comme une réception passive. | Aucune restriction sur l'utilisation GNSS ; les systèmes étrangers sont autorisés. | Le système régional QZSS est largement pris en charge et couramment utilisé en plus du GPS et d'autres GNSS. |
| Chine | Les récepteurs GNSS ne nécessitent pas de licence radio dédiée. La conformité CEM générale s'applique. | Aucune interdiction formelle de la réception GPS, Galileo ou GLONASS. | La compatibilité BeiDou est fortement encouragée et peut être requise dans les applications du secteur public ou liées au gouvernement. |
| Russie | Aucune licence radio séparée n'est requise pour les récepteurs GNSS. L'accès au marché nécessite généralement la conformité EAC pour l'appareil dans son ensemble. | Aucune restriction sur l'utilisation GNSS. | Support GLONASS obligatoire pour les appareils de navigation vendus en Russie ; requis pour des systèmes tels que ERA-GLONASS. |
| Inde | Aucune approbation radio individuelle n'est requise pour les récepteurs GNSS. Les exigences générales de CEM s'appliquent. | Aucune restriction sur les systèmes GNSS étrangers. | Le support NavIC est de plus en plus obligatoire, y compris des exigences annoncées pour les smartphones et certaines applications de navigation. |
| Autres marchés | Les récepteurs GNSS sont généralement traités comme des appareils radio passifs et ne nécessitent pas de licence individuelle. | Utilisation GNSS généralement sans restriction. | Les systèmes locaux peuvent être promus ; les réglementations générales de CEM et de sécurité des produits s'appliquent. |
Résumé et implications pratiques
Les récepteurs GNSS ne nécessitent généralement pas de licences radio individuelles, mais doivent respecter les réglementations régionales sur les équipements radio et la CEM.
Les exigences réglementaires portent sur les émissions, l'efficacité spectrale et la conformité au niveau de l'appareil plutôt que sur la réception du signal satellite elle-même.
Les mandats spécifiques à l'application jouent un rôle crucial dans l'accès au marché, tels que Galileo pour l'eCall de l'UE, GLONASS en Russie ou NavIC en Inde.
Les fabricants doivent documenter clairement les constellations GNSS prises en charge et vérifier la conformité aux exigences d'application régionales lors du développement du produit.
Exemples d'application pratique
Les exigences relatives aux récepteurs GNSS varient considérablement selon le contexte d'application. Bien que la technologie de positionnement sous-jacente soit similaire, les attentes en matière de performance, les contraintes réglementaires et les priorités de validation diffèrent selon les secteurs. Les exemples suivants illustrent comment le GNSS est appliqué dans des scénarios réels typiques et quels aspects techniques et de conformité sont les plus pertinents.
Applications automobiles
Dans le secteur automobile, le GNSS est un composant critique pour la sécurité et le fonctionnement, utilisé pour la navigation, les services de flotte, l'aide à la conduite et les systèmes d'urgence.
Cas d'utilisation typiques
Navigation guidée et services basés sur les cartes
Systèmes d'appel d'urgence (eCall / ERA-GLONASS)
Suivi de flotte et télématique
Support des systèmes avancés d'aide à la conduite (ADAS)
Exigences techniques clés
Haute disponibilité en milieu urbain et dans les tunnels
TTFF rapide et fiable après le démarrage du véhicule
Suivi robuste sous mouvement dynamique et obstruction du signal
Prise en charge de plusieurs constellations pour améliorer la visibilité des satellites
Focus réglementaire et essais
Prise en charge obligatoire de Galileo pour les systèmes eCall de l'UE
Prise en charge de GLONASS pour les applications automobiles russes
Validation des performances selon ETSI EN 303 413
Essais basés sur simulateur pour des scénarios de sécurité reproductibles
Applications drones et UAV
Le GNSS joue un rôle central dans les véhicules aériens sans pilote (UAV), permettant la navigation, la stabilisation, le géorepérage et les fonctions de vol autonomes.
Cas d'utilisation typiques
Maintien de position et navigation par points de passage
Vol autonome et fonctions de retour à la base
Géorepérage et conformité à l'espace aérien
Topographie, cartographie et inspection
Exigences techniques clés
Haute précision de positionnement et faible latence
Fonctionnement fiable sous forte dynamique et changements rapides d'attitude
Robustesse face aux interférences des radios et moteurs embarqués
Prise en charge multi-bandes et double fréquence pour une précision améliorée
Focus réglementaire et essais
Vérification des performances GNSS pour la sécurité de vol
Validation selon des profils de mouvement dynamique
Essais d'interférence et de coexistence avec les émetteurs RF
Importance croissante du GNSS double fréquence pour les UAV professionnels
Applications IoT et suivi d'actifs
Dans les appareils IoT, le GNSS est couramment utilisé pour le suivi d'actifs, la logistique et les applications de surveillance, souvent sous des contraintes strictes de puissance et de taille.
Cas d'utilisation typiques
Suivi d'actifs et de conteneurs
Logistique intelligente et surveillance de la chaîne d'approvisionnement
Suivi de la faune et du bétail
Surveillance des infrastructures et synchronisation temporelle
Exigences techniques clés
Faible consommation d'énergie et cycle de service efficace
Acquisition fiable à de faibles niveaux de signal
TTFF acceptable après de longues périodes de veille
Intégration compacte de l'antenne et du front-end RF
Focus réglementaire et essais
Sensibilité et performance de suivi à faible puissance
Coexistence avec les radios cellulaires (LTE-M, NB-IoT) et LPWAN
Validation des scénarios de TTFF au démarrage à froid
Exigences régionales telles que la prise en charge de NavIC pour le marché indien
Considérations transversales
Dans tous les domaines d'application, la performance et la conformité du GNSS dépendent d'une validation contrôlée et reproductible :
Les essais basés sur simulateur permettent une évaluation cohérente de la sensibilité, du TTFF et de la précision
La prise en charge de plusieurs constellations améliore la robustesse dans des environnements difficiles
Les exigences réglementaires influencent de plus en plus les constellations GNSS prises en charge
Les essais d'intégration sont essentiels lorsque le GNSS fonctionne avec d'autres technologies radio
Comparaison des applications GNSS
| Aspect | Détails |
|---|---|
| Automobile |
Cas d'utilisation principal : Navigation, eCall, télématique Priorité de performance : Disponibilité et robustesse Configuration GNSS typique : Multi-constellation, de plus en plus double fréquence Relevance TTFF : Moyenne à élevée Sensibilité aux interférences : Élevée (coexistence avec le réseau cellulaire) Focus réglementaire : RED, EN 303 413, exigences eCall |
| Drones / UAV |
Cas d'utilisation principal : Commande de vol, positionnement, géorepérage Priorité de performance : Précision et réponse dynamique Configuration GNSS typique : Multi-constellation, double fréquence courante Relevance TTFF : Élevée (liée à la sécurité) Sensibilité aux interférences : Élevée (RF embarquée et moteurs) Focus réglementaire : Sécurité opérationnelle, conformité de l'espace aérien |
| IoT / Suivi d'actifs |
Cas d'utilisation principal : Suivi d'actifs, logistique, surveillance Priorité de performance : Efficacité énergétique et sensibilité Configuration GNSS typique : Simple ou multi-constellation, souvent simple fréquence Relevance TTFF : Élevée après de longs cycles de veille Sensibilité aux interférences : Moyenne à élevée (coexistence avec LPWAN cellulaire) Focus réglementaire : Exigences du marché régional (par ex. NavIC) |
| Aspect | Automobile | Drones / UAV | IoT / Suivi d'actifs |
|---|---|---|---|
| Cas d'utilisation principal | Navigation, eCall, télématique | Commande de vol, positionnement, géorepérage | Suivi d'actifs, logistique, surveillance |
| Priorité de performance | Disponibilité et robustesse | Précision et réponse dynamique | Efficacité énergétique et sensibilité |
| Configuration GNSS typique | Multi-constellation, de plus en plus double fréquence | Multi-constellation, double fréquence courante | Simple ou multi-constellation, souvent simple fréquence |
| Relevance TTFF | Moyenne à élevée | Élevée (liée à la sécurité) | Élevée après de longs cycles de veille |
| Sensibilité aux interférences | Élevée (coexistence avec le réseau cellulaire) | Élevée (RF embarquée et moteurs) | Moyenne à élevée (coexistence avec LPWAN cellulaire) |
| Focus réglementaire | RED, EN 303 413, exigences eCall | Sécurité opérationnelle, conformité de l'espace aérien | Exigences du marché régional (par ex. NavIC) |
Bien que le tableau ci-dessus mette en évidence les différences d'exigences GNSS entre les applications automobiles, les drones et l'IoT, les fabricants sont souvent confrontés à des questions pratiques récurrentes lors de la préparation de leurs produits pour les marchés mondiaux.
Les FAQ suivantes abordent des sujets courants liés à la classification réglementaire, aux obligations de certification, au support des constellations et aux attentes en matière d'essais pour les récepteurs GNSS.
FAQ – Récepteurs GNSS et accès au marché
Les récepteurs GNSS nécessitent-ils une homologation radio ?
Les récepteurs GNSS sont des dispositifs passifs et ne nécessitent généralement pas de licences de fréquence individuelles ou d'approbations liées à l'émetteur. Cependant, les produits équipés de GNSS restent soumis aux cadres réglementaires généraux couvrant la CEM, la sécurité et les émissions non intentionnelles.
Comment les récepteurs GNSS sont-ils réglementés sur les principaux marchés tels que l'UE et les États-Unis ?
Dans l'Union européenne, les récepteurs GNSS relèvent de la directive sur les équipements radio et doivent démontrer la conformité CE, y compris la conformité CEM et, pour certaines applications, la norme ETSI EN 303 413.
Aux États-Unis, les récepteurs GNSS purs ne nécessitent généralement pas de certification FCC, mais les appareils doivent respecter les limites de la partie 15 de la FCC pour les rayonnements non intentionnels.
Y a-t-il des restrictions sur les constellations GNSS pouvant être utilisées ?
Dans la plupart des marchés, la réception de plusieurs constellations GNSS telles que GPS, Galileo, GLONASS et BeiDou est autorisée. Certaines applications imposent des systèmes spécifiques, comme Galileo pour l'eCall européen ou NavIC pour certains produits indiens.
Les récepteurs GNSS sont-ils soumis à des essais CEM et d'immunité aux interférences ?
Oui. Bien que les récepteurs GNSS soient passifs, l'appareil complet doit respecter les limites CEM applicables et démontrer une immunité suffisante aux interférences, en particulier lorsqu'il est intégré avec des technologies cellulaires, Wi-Fi ou d'autres technologies radio.
Les essais basés sur des simulateurs sont-ils obligatoires pour les récepteurs GNSS ?
Les essais basés sur des simulateurs ne sont pas toujours légalement obligatoires, mais ils constituent la méthode privilégiée pour la validation des performances. Les simulateurs GNSS permettent des essais contrôlés et reproductibles de la sensibilité, du TTFF, de la précision et de la robustesse, ce qui ne peut être réalisé de manière fiable avec des mesures en ciel ouvert uniquement.
Quand la conformité GNSS doit-elle être prise en compte lors du développement du produit ?
La conformité et la validation des performances GNSS doivent être prises en compte dès la phase de conception. La conception de l'antenne, la coexistence RF et le choix de la constellation influencent directement les performances et la conformité réglementaire.
Besoin d'un soutien pour les essais de récepteurs GNSS ?
Nos laboratoires accrédités prennent en charge l'évaluation des récepteurs GNSS grâce à la simulation de signaux contrôlée, aux essais de performance et aux mesures orientées conformité. Cela inclut la sensibilité, le TTFF, la validation de la précision, la résilience aux interférences et les exigences spécifiques à l'application pour les dispositifs automobiles et IoT.
Lectures complémentaires et ressources officielles
Règlementations GNSS sélectionnées et références techniques
-
ETSI EN 303 413 (Europe, UE)
Exigences de performance pour les récepteurs GNSS dans le cadre de la directive sur les équipements radioélectriques (RED), y compris le blocage du récepteur et les émissions parasites : ETSI (PDF)
-
Directive sur les équipements radioélectriques (2014/53/UE)
Cadre juridique régissant les équipements radioélectriques mis sur le marché européen, y compris les récepteurs GNSS : Journal officiel de l'Union européenne
-
ETSI EN 301 489-1
Norme de base CEM applicable aux équipements radioélectriques, y compris les appareils compatibles GNSS : ETSI (PDF)
-
47 CFR §15.109 / §15.107 (FCC - USA)
Limites d'émissions rayonnées et conduites pour les appareils numériques intégrant des récepteurs GNSS : eCFR
-
FCC Part 15 (émetteurs non intentionnels)
Limites d'émission applicables aux appareils compatibles GNSS sans émetteurs intentionnels : eCFR
Références des systèmes GNSS
-
Centre de services GNSS européen (EUSPA)
Informations officielles sur les services Galileo, les caractéristiques de performance et les exigences d'application : gsc-europa.eu
-
Spécification d'interface GPS (IS-GPS)
Spécifications techniques publiques définissant les structures de signal GPS et les performances : gps.gov
Ressource supplémentaire
-
TAMSys par IB-Lenhardt AG – Système de gestion de l'homologation
Une plateforme de conformité centralisée pour gérer l'homologation radio, les données réglementaires et le suivi des certificats sur les principaux marchés, notamment l'UE, les États-Unis, la Chine, le Japon, le Brésil et bien d'autres. → TAMSys – Système de gestion de l'homologation
Ceci est une sélection ciblée de références réglementaires et techniques clés. Les récepteurs GNSS sont soumis à moins de normes formalisées que les émetteurs radio actifs. Les fabricants doivent toujours vérifier les exigences actuelles auprès des autorités compétentes et des réglementations spécifiques à l'application. Toutes les références ont été vérifiées en janvier 2026.