GNSS – Technology and Compliance
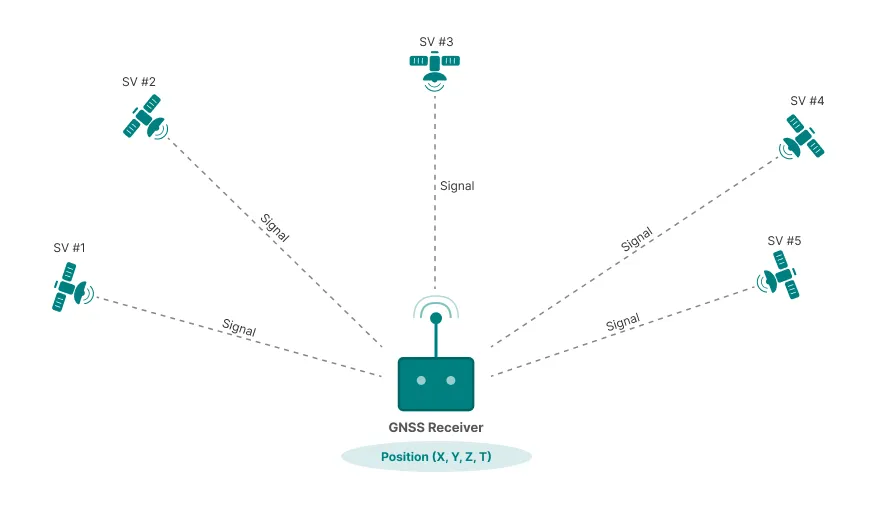
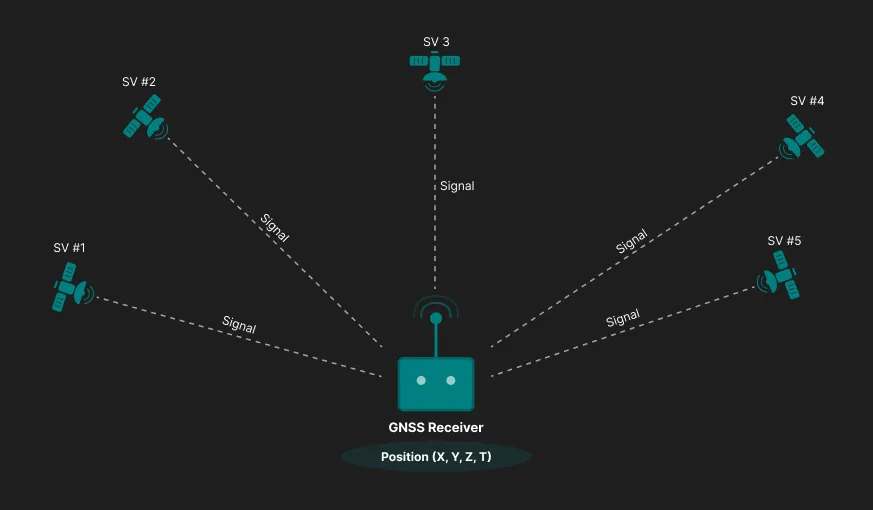
Global Navigation Satellite Systems (GNSS) enable satellite-based positioning, navigation, and timing (PNT) by receiving signals from multiple global and regional satellite constellations in the L-band.
As a passive receiver technology, GNSS does not transmit radio signals but relies on precise signal reception, processing, and integration into the host device. For manufacturers, ensuring reliable GNSS performance and global market access requires reproducible performance validation and compliance with regional regulatory and application-specific requirements.
Working on GNSS receiver testing for your product?
We support GNSS receiver testing through signal simulation, performance assessment, and compliance evaluation for Automotive / eCall and IoT / Asset Tracking applications.
Key Takeaways
GNSS receivers rely on satellite-based positioning and timing using extremely weak signals (around −130 dBm), making antenna design and signal processing critical for reliable operation.
Receiver performance is defined by sensitivity, Time to First Fix (TTFF), and positioning accuracy under controlled and repeatable test conditions.
Simulator-based testing enables reproducible evaluation of GNSS performance, including sensitivity, TTFF, dynamics, and interference resilience, beyond what live-sky testing can provide.
Global market access depends on meeting regional regulatory frameworks and application-specific mandates, such as ETSI EN 303 413, Galileo support for EU eCall, or NavIC requirements in India.
Technology Overview
Global Navigation Satellite System receivers process signals transmitted by satellites operating in medium Earth orbit at an altitude of approximately 20,000 km. Each GNSS operates its own satellite constellation, typically consisting of 24 to 35 satellites, and broadcasts coded timing signals on defined frequency bands.
Modern receivers support multi-constellation operation, allowing the simultaneous use of signals from multiple systems to improve availability and overall positioning performance.
Positioning with GNSS
The following sections provide an overview of the main global GNSS constellations, frequency bands, and key technical characteristics.
Global GNSS Overview
| System | Details |
|---|---|
| GPS (Navstar) |
Operator / Region: United States (US Space Force) Primary Signals: L1, L5 Key Characteristics: Longest-operating global GNSS; worldwide baseline system; civil and military services; broad device support |
| Galileo |
Operator / Region: European Union Primary Signals: E1, E5 Key Characteristics: Civil-focused system; high-accuracy open service; mandatory for European eCall applications |
| GLONASS |
Operator / Region: Russian Federation Primary Signals: G1, G2 Key Characteristics: Global coverage; frequency-division multiple access (FDMA); often combined with GPS |
| BeiDou |
Operator / Region: China Primary Signals: B1, B2 Key Characteristics: Global system with regional augmentation; strong Asia-Pacific coverage; increasing international adoption |
| NavIC (IRNSS) |
Operator / Region: India Primary Signals: L5, S-band Key Characteristics: Regional system; mandatory for certain Indian market applications; complements global GNSS |
| System | Operator / Region | Primary Signals (overview) | Key Characteristics |
|---|---|---|---|
| GPS (Navstar) | United States (US Space Force) | L1, L5 | Longest-operating global GNSS; worldwide baseline system; civil and military services; broad device support |
| Galileo | European Union | E1, E5 | Civil-focused system; high-accuracy open service; mandatory for European eCall applications |
| GLONASS | Russian Federation | G1, G2 | Global coverage; frequency-division multiple access (FDMA); often combined with GPS |
| BeiDou | China | B1, B2 | Global system with regional augmentation; strong Asia-Pacific coverage; increasing international adoption |
| NavIC (IRNSS) | India | L5, S-band | Regional system; mandatory for certain Indian market applications; complements global GNSS |
Signals and Frequency Bands
GNSS receivers operate in the L-band and process spread-spectrum signals transmitted on well-defined carrier frequencies. These signals carry precise timing information that allows the receiver to calculate pseudoranges to multiple satellites. The choice of frequency bands directly affects receiver performance, robustness, and regulatory relevance.
Common GNSS Frequency Bands
| Band / Signal | Details |
|---|---|
| L1 / E1 |
Approx. Frequency: ~1575 MHz Used by: GPS, Galileo, QZSS Technical Relevance: Primary civil GNSS band; broadest device support; baseline for positioning |
| L2 |
Approx. Frequency: ~1227 MHz Used by: GPS, GLONASS Technical Relevance: Additional frequency used in multi-band receivers |
| L5 / E5a |
Approx. Frequency: ~1176 MHz Used by: GPS, Galileo, NavIC Technical Relevance: Higher signal robustness; used in safety-related and advanced applications |
| E5b / B2 |
Approx. Frequency: ~1207 MHz Used by: Galileo, BeiDou Technical Relevance: Complementary precision band supporting dual-frequency operation |
| B1 |
Approx. Frequency: ~1561 MHz Used by: BeiDou Technical Relevance: BeiDou service band with regional and global relevance |
| S-band |
Approx. Frequency: ~2492 MHz Used by: NavIC Technical Relevance: Regional augmentation band with Indian market relevance |
| Band / Signal | Approx. Frequency | Used by (examples) | Technical Relevance |
|---|---|---|---|
| L1 / E1 | ~1575 MHz | GPS, Galileo, QZSS | Primary civil GNSS band; broadest device support; baseline for positioning |
| L2 | ~1227 MHz | GPS, GLONASS | Additional frequency used in multi-band receivers |
| L5 / E5a | ~1176 MHz | GPS, Galileo, NavIC | Higher signal robustness; used in safety-related and advanced applications |
| E5b / B2 | ~1207 MHz | Galileo, BeiDou | Complementary precision band supporting dual-frequency operation |
| B1 | ~1561 MHz | BeiDou | BeiDou service band with regional and global relevance |
| S-band | ~2492 MHz | NavIC | Regional augmentation band with Indian market relevance |
Dual-Frequency Operation
Modern GNSS receivers increasingly support dual-frequency operation, typically combining L1 or E1 with L5 or E5 signals. By comparing signal propagation on two frequencies, ionospheric delay effects can be significantly reduced, resulting in improved positioning robustness and reliability, especially in challenging environments.
GNSS Receiver Architecture
Quick Overview
- Signal Reception: Captures weak satellite signals (typically −130 dBm) and amplifies them for processing
- Digital Processing: Acquires and tracks satellite codes to extract timing information
- Position Calculation: Computes 3D position from at least four satellite signals
- Multi-System Support: Modern receivers process GPS, Galileo, GLONASS, and BeiDou simultaneously
Downconversion & Digitization
After filtering and amplification, the received signals are downconverted to an intermediate or baseband frequency and digitized. This step prepares the signal for correlation and tracking in the digital domain.
Modern GNSS receivers use analog-to-digital converters (ADCs) to digitize signals at rates sufficient to capture the spreading bandwidth (typically 2–40 MHz depending on signal type). The digitized signals are then processed by correlation engines to extract timing and navigation data.
Signal Acquisition
During acquisition, the receiver searches for visible satellites by correlating incoming signals with known GNSS spreading codes. This process identifies satellite signals and provides coarse estimates of code phase and Doppler frequency.
The time required to achieve first position fix (TTFF – Time To First Fix) depends on whether the receiver has valid almanac data and recent position information. Cold start scenarios (no prior data) typically require 30–60 seconds, while warm or hot starts can achieve position fixes within seconds.
Signal Tracking
Once acquired, tracking loops continuously refine timing and frequency estimates. Stable tracking is essential to maintain lock on satellites and to support accurate pseudorange measurements under varying signal conditions.
Tracking loops include delay-locked loops (DLL) for code tracking and phase-locked loops (PLL) or frequency-locked loops (FLL) for carrier tracking. These loops must balance noise performance with dynamic response to maintain stable operation during receiver movement or signal fading.
Navigation Solution
The navigation engine computes position, velocity, and time based on pseudorange measurements from multiple satellites. At least four satellites are required to resolve three-dimensional position and receiver clock offset.
Pseudoranges represent the measured distance between the satellite and receiver, including receiver clock error. The navigation engine solves a system of equations relating satellite positions, pseudoranges, and receiver position using iterative algorithms or Kalman filtering techniques.
Position accuracy depends on satellite geometry, atmospheric delays, multipath propagation, and receiver noise. Typical single-frequency receivers achieve 3–5 meter accuracy under open sky conditions. Advanced receivers using dual-frequency operation and multiple constellations can significantly improve positioning accuracy and reliability.
Advanced Capabilities
Multi-Constellation Processing
Modern GNSS receivers process signals from multiple satellite systems simultaneously, improving satellite availability and positioning robustness. By combining GPS, Galileo, GLONASS, and BeiDou signals, receivers increase the number of visible satellites, particularly in challenging environments such as urban canyons or under foliage.
Multi-constellation operation also enhances resistance to localized signal blockage and provides redundancy if one system experiences service interruptions. The use of multiple constellations is increasingly mandatory for certain applications, such as European eCall systems which require Galileo support.
Dual-Frequency Operation
Dual-frequency receivers process signals on two frequency bands (typically L1/E1 and L5/E5) to eliminate ionospheric delay errors. By comparing signal propagation times across different frequencies, the receiver can calculate and remove ionospheric distortion, significantly improving position accuracy without requiring external correction data.
This capability is particularly valuable in environments with high ionospheric activity or for applications requiring consistent accuracy regardless of atmospheric conditions.
Coexistence and Integration Considerations
GNSS receivers are commonly integrated into devices that also contain cellular, Wi-Fi, Bluetooth, or UWB radios. Careful RF design is required to avoid desensitization caused by nearby transmitters, particularly when GNSS antennas and front-end components are placed in close proximity to active radios.
Key integration challenges include:
- Out-of-Band Interference: Strong transmitters in adjacent frequency bands (e.g., LTE Band 1 near 2100 MHz) can generate harmonics or intermodulation products that fall within GNSS bands
- Front-End Overload: High-power transmissions can saturate the GNSS LNA, reducing sensitivity even when the interfering signal is out-of-band
- Antenna Coupling: Inadequate isolation between GNSS and other radio antennas can result in direct coupling of interfering signals
Interference mitigation strategies include spatial separation of antennas, frequency planning, time-domain blanking during transmit bursts, and adaptive filtering in the digital domain. Testing for coexistence performance is essential to ensure reliable GNSS operation in real-world deployment scenarios.
→ Performance validation and compliance testing address these integration challenges through controlled measurement scenarios. See GNSS receiver testing for detailed guidance on evaluation methods and regulatory requirements.
Performance Parameters and Test Metrics
GNSS receiver performance is defined by how reliably satellite signals can be acquired, tracked, and converted into accurate position, velocity, and time information under real-world conditions. Due to the extremely low signal levels involved, performance must be evaluated using well-defined and reproducible metrics.
The following parameters are commonly used to characterize GNSS receiver performance across applications such as automotive systems, IoT tracking devices, and safety-related positioning functions.
Sensitivity
Sensitivity describes the minimum signal power level at which a GNSS receiver can successfully acquire or track satellite signals.
Two sensitivity metrics are typically distinguished:
Acquisition Sensitivity
The lowest signal level at which the receiver can detect and acquire a satellite signal and achieve an initial position fix.Tracking Sensitivity
The lowest signal level at which the receiver can maintain lock on an already acquired satellite signal.
Tracking sensitivity is usually several decibels better than acquisition sensitivity and is critical for operation in environments with signal attenuation, such as urban canyons, indoor-adjacent locations, or under foliage.
Time to First Fix (TTFF)
Time to First Fix describes the time required for a GNSS receiver to compute its first valid position solution after power-up or reset.
TTFF depends strongly on receiver state and available assistance data:
Cold Start
No valid almanac, ephemeris, or prior position information is available. Typical TTFF ranges from 30 to 60 seconds.Warm Start
Almanac data and approximate position are available, but ephemeris data is outdated. TTFF is typically reduced to several seconds.Hot Start
Valid ephemeris and recent position information are available. Position fixes are usually achieved within one to two seconds.
TTFF is a key performance indicator for user experience and for applications that require rapid positioning after power cycling.
Position Accuracy
Position accuracy describes the deviation between the reported receiver position and the true location. It is commonly expressed as horizontal and vertical error under defined test conditions.
Accuracy is influenced by several factors:
Satellite geometry (dilution of precision)
Atmospheric delays (ionospheric and tropospheric)
Multipath propagation
Receiver noise and processing algorithms
Under open-sky conditions, single-frequency receivers typically achieve horizontal accuracies in the range of a few meters. Multi-constellation and dual-frequency receivers can significantly improve accuracy and robustness, particularly in challenging environments.
Robustness and Interference Resilience
Robustness describes the receiver’s ability to maintain positioning performance in the presence of signal impairments.
Relevant aspects include:
Resistance to in-band and out-of-band interference
Tolerance to adjacent radio transmitters within the same device
Stability under dynamic conditions such as vehicle motion or signal fading
Interference resilience is especially important for integrated devices that combine GNSS with cellular, Wi-Fi, or other wireless technologies.
Testing and Validation Methods
GNSS receiver testing focuses on verifying performance parameters under controlled, repeatable conditions. Because GNSS signals are extremely weak and environmental influences cannot be controlled in real-world scenarios, laboratory-based testing is essential for reliable performance validation and compliance assessment.
Testing methods are selected based on development stage, application context, and regulatory requirements.
Simulator-Based Testing
GNSS simulators generate realistic satellite signals and allow precise control over signal parameters, satellite geometry, and environmental conditions. This enables reproducible testing that cannot be achieved with live-sky measurements.
Typical simulator-based test scenarios include:
Controlled satellite visibility and geometry
Adjustable signal power levels for sensitivity testing
Cold, warm, and hot start TTFF evaluation
Dynamic scenarios with configurable motion profiles
Multi-constellation and multi-frequency operation
Simulator testing is the preferred method for performance characterization, regression testing, and certification-related measurements.
Live-Sky Testing
Live-sky testing uses real satellite signals received via an antenna in an outdoor environment. It provides realistic operating conditions but lacks reproducibility and control.
Live-sky testing is typically used for:
Functional verification during development
Field validation of integrated devices
User experience assessment
Due to uncontrolled variables such as satellite geometry, interference, and weather, live-sky testing is not suitable as the sole basis for performance validation or compliance evidence.
Sensitivity and TTFF Evaluation
Sensitivity and TTFF measurements are commonly performed using GNSS simulators to ensure consistent and repeatable results.
Typical approaches include:
Gradual signal attenuation to determine acquisition and tracking thresholds
Defined start conditions for cold, warm, and hot start TTFF measurements
Verification across supported constellations and frequency bands
These measurements directly support the performance parameters defined in the previous section.
Interference and Robustness Testing
Robustness testing evaluates receiver performance in the presence of signal impairments and interference sources.
Relevant test aspects include:
In-band and out-of-band interference injection
Adjacent transmitter coexistence scenarios
Signal blockage and fading simulation
Dynamic stress testing under motion and power variation
Such tests are particularly important for devices integrating GNSS with cellular, Wi-Fi, or other wireless technologies.
Compliance-Oriented Testing
For certain applications and markets, GNSS receivers must demonstrate compliance with defined performance and emission requirements.
Examples include:
Performance validation under ETSI EN 303 413 for European markets
Verification of receiver blocking and spurious emissions
Documentation of test conditions, uncertainty, and repeatability
Compliance-oriented testing builds upon simulator-based measurements and requires traceable, well-documented test procedures.
Regulatory and Application-Specific Requirements
GNSS receivers are passive radio devices that do not transmit radio signals themselves. As a result, they generally do not require individual frequency licenses or radio type approvals in most markets.
However, GNSS receivers are still subject to regional regulatory frameworks covering radio equipment, electromagnetic compatibility, and application-specific requirements. In addition, certain markets mandate support for specific satellite systems for safety-related or nationally regulated use cases.
The following overview summarizes key regulatory considerations relevant to GNSS receiver integration and global market access.
| Region | Details |
|---|---|
| EU |
Regulatory Status: GNSS receivers are considered radio equipment under the Radio Equipment Directive (RED). No individual radio license is required, but CE conformity is mandatory, including efficient spectrum use and EMC compliance (e.g. ETSI EN 303 413). GNSS Usage Restrictions: No restrictions on GNSS usage; all major systems may be received. Application-Specific Requirements: Mandatory Galileo support for eCall systems in vehicles; increasing Galileo relevance for emergency services (e.g. E112/AML). |
| USA |
Regulatory Status: Passive GNSS receivers do not require FCC certification if they do not intentionally transmit. Devices must comply with FCC Part 15 limits for unintentional radiators. GNSS Usage Restrictions: GPS and Galileo reception explicitly permitted. Reception of GLONASS and BeiDou is currently tolerated; no formal prohibition exists. Application-Specific Requirements: No mandatory multi-GNSS requirements for consumer devices; regulatory focus on emissions and interference. |
| Canada |
Regulatory Status: Similar to the US: no specific radio approval required for passive GNSS receivers. Devices must meet general EMC requirements (ICES-003). GNSS Usage Restrictions: No restrictions on the use of foreign GNSS systems. Application-Specific Requirements: No mandatory constellation requirements; multi-GNSS commonly used. |
| Japan |
Regulatory Status: Pure GNSS receivers do not require radio certification (Giteki). GNSS is treated as passive reception. GNSS Usage Restrictions: No restrictions on GNSS usage; foreign systems are permitted. Application-Specific Requirements: Regional QZSS system is widely supported and commonly used in addition to GPS and other GNSS. |
| China |
Regulatory Status: GNSS receivers do not require a dedicated radio license. General EMC compliance applies. GNSS Usage Restrictions: No formal prohibition on GPS, Galileo, or GLONASS reception. Application-Specific Requirements: BeiDou compatibility is strongly encouraged and may be required in public-sector or government-related applications. |
| Russia |
Regulatory Status: No separate radio license required for GNSS receivers. Market access typically requires EAC conformity for the overall device. GNSS Usage Restrictions: No restriction on GNSS usage. Application-Specific Requirements: Mandatory GLONASS support for navigation devices sold in Russia; required for systems such as ERA-GLONASS. |
| India |
Regulatory Status: No individual radio approval required for GNSS receivers. General EMC requirements apply. GNSS Usage Restrictions: No restriction on foreign GNSS systems. Application-Specific Requirements: NavIC support is increasingly mandated, including announced requirements for smartphones and certain navigation applications. |
| Other Markets |
Regulatory Status: GNSS receivers are generally treated as passive radio devices and do not require individual licensing. GNSS Usage Restrictions: Typically unrestricted GNSS usage. Application-Specific Requirements: Local systems may be promoted; general EMC and product safety regulations apply. |
| Region | Regulatory Status of GNSS Receivers | GNSS Usage Restrictions | Application-Specific Requirements |
|---|---|---|---|
| EU | GNSS receivers are considered radio equipment under the Radio Equipment Directive (RED). No individual radio license is required, but CE conformity is mandatory, including efficient spectrum use and EMC compliance (e.g. ETSI EN 303 413). | No restrictions on GNSS usage; all major systems may be received. | Mandatory Galileo support for eCall systems in vehicles; increasing Galileo relevance for emergency services (e.g. E112/AML). |
| USA | Passive GNSS receivers do not require FCC certification if they do not intentionally transmit. Devices must comply with FCC Part 15 limits for unintentional radiators. | GPS and Galileo reception explicitly permitted. Reception of GLONASS and BeiDou is currently tolerated; no formal prohibition exists. | No mandatory multi-GNSS requirements for consumer devices; regulatory focus on emissions and interference. |
| Canada | Similar to the US: no specific radio approval required for passive GNSS receivers. Devices must meet general EMC requirements (ICES-003). | No restrictions on the use of foreign GNSS systems. | No mandatory constellation requirements; multi-GNSS commonly used. |
| Japan | Pure GNSS receivers do not require radio certification (Giteki). GNSS is treated as passive reception. | No restrictions on GNSS usage; foreign systems are permitted. | Regional QZSS system is widely supported and commonly used in addition to GPS and other GNSS. |
| China | GNSS receivers do not require a dedicated radio license. General EMC compliance applies. | No formal prohibition on GPS, Galileo, or GLONASS reception. | BeiDou compatibility is strongly encouraged and may be required in public-sector or government-related applications. |
| Russia | No separate radio license required for GNSS receivers. Market access typically requires EAC conformity for the overall device. | No restriction on GNSS usage. | Mandatory GLONASS support for navigation devices sold in Russia; required for systems such as ERA-GLONASS. |
| India | No individual radio approval required for GNSS receivers. General EMC requirements apply. | No restriction on foreign GNSS systems. | NavIC support is increasingly mandated, including announced requirements for smartphones and certain navigation applications. |
| Other Markets | GNSS receivers are generally treated as passive radio devices and do not require individual licensing. | Typically unrestricted GNSS usage. | Local systems may be promoted; general EMC and product safety regulations apply. |
Summary and Practical Implications
GNSS receivers generally do not require individual radio licenses, but must comply with regional radio equipment and EMC regulations.
Regulatory requirements focus on emissions, spectrum efficiency, and device-level conformity rather than satellite signal reception itself.
Application-specific mandates play a critical role in market access, such as Galileo for EU eCall, GLONASS in Russia, or NavIC in India.
Manufacturers should clearly document supported GNSS constellations and verify compliance with regional application requirements during product development.
Practical Application Examples
GNSS receiver requirements vary significantly depending on the application context. While the underlying positioning technology is similar, performance expectations, regulatory constraints, and validation priorities differ across industries. The following examples illustrate how GNSS is applied in typical real-world scenarios and which technical and compliance aspects are most relevant.
Automotive Applications
In the automotive sector, GNSS is a safety- and function-critical component used for navigation, fleet services, driver assistance, and emergency systems.
Typical use cases
Turn-by-turn navigation and map-based services
Emergency call systems (eCall / ERA-GLONASS)
Fleet tracking and telematics
Advanced driver assistance systems (ADAS) support
Key technical requirements
High availability in urban environments and tunnels
Fast and reliable TTFF after vehicle start
Robust tracking under dynamic motion and signal blockage
Multi-constellation support to improve satellite visibility
Regulatory and testing focus
Mandatory Galileo support for EU eCall systems
GLONASS support for Russian automotive applications
Performance validation under ETSI EN 303 413
Simulator-based testing for repeatable safety-relevant scenarios
Drone and UAV Applications
GNSS plays a central role in unmanned aerial vehicles (UAVs), enabling navigation, stabilization, geofencing, and autonomous flight functions.
Typical use cases
Position hold and waypoint navigation
Autonomous flight and return-to-home functions
Geofencing and airspace compliance
Surveying, mapping, and inspection
Key technical requirements
High positioning accuracy and low latency
Reliable operation under high dynamics and rapid attitude changes
Robustness against interference from onboard radios and motors
Multi-band and dual-frequency support for improved accuracy
Regulatory and testing focus
GNSS performance verification for flight safety
Validation under dynamic motion profiles
Interference and coexistence testing with RF transmitters
Increasing relevance of dual-frequency GNSS for professional UAVs
IoT and Asset Tracking Applications
In IoT devices, GNSS is commonly used for asset tracking, logistics, and monitoring applications, often under strict power and size constraints.
Typical use cases
Asset and container tracking
Smart logistics and supply chain monitoring
Wildlife and livestock tracking
Infrastructure monitoring and timing synchronization
Key technical requirements
Low power consumption and efficient duty cycling
Reliable acquisition at low signal levels
Acceptable TTFF after long sleep intervals
Compact antenna and RF front-end integration
Regulatory and testing focus
Sensitivity and tracking performance at low power levels
Coexistence with cellular (LTE-M, NB-IoT) and LPWAN radios
Validation of cold-start TTFF scenarios
Regional requirements such as NavIC support for the Indian market
Cross-Application Considerations
Across all application domains, GNSS performance and compliance depend on controlled and reproducible validation:
Simulator-based testing enables consistent evaluation of sensitivity, TTFF, and accuracy
Multi-constellation support improves robustness in challenging environments
Regulatory requirements increasingly influence supported GNSS constellations
Integration testing is essential where GNSS operates alongside other radio technologies
GNSS Application Comparison
| Aspect | Details |
|---|---|
| Automotive |
Primary Use Case: Navigation, eCall, telematics Performance Priority: Availability and robustness Typical GNSS Configuration: Multi-constellation, increasingly dual-frequency TTFF Relevance: Medium to high Interference Sensitivity: High (coexistence with cellular) Regulatory Focus: RED, EN 303 413, eCall requirements |
| Drones / UAV |
Primary Use Case: Flight control, positioning, geofencing Performance Priority: Accuracy and dynamic response Typical GNSS Configuration: Multi-constellation, dual-frequency common TTFF Relevance: High (safety-related) Interference Sensitivity: High (onboard RF and motors) Regulatory Focus: Operational safety, airspace compliance |
| IoT / Asset Tracking |
Primary Use Case: Asset tracking, logistics, monitoring Performance Priority: Power efficiency and sensitivity Typical GNSS Configuration: Single or multi-constellation, often single-frequency TTFF Relevance: High after long sleep cycles Interference Sensitivity: Medium to high (cellular LPWAN coexistence) Regulatory Focus: Regional market requirements (e.g. NavIC) |
| Aspect | Automotive | Drones / UAV | IoT / Asset Tracking |
|---|---|---|---|
| Primary Use Case | Navigation, eCall, telematics | Flight control, positioning, geofencing | Asset tracking, logistics, monitoring |
| Performance Priority | Availability and robustness | Accuracy and dynamic response | Power efficiency and sensitivity |
| Typical GNSS Configuration | Multi-constellation, increasingly dual-frequency | Multi-constellation, dual-frequency common | Single or multi-constellation, often single-frequency |
| TTFF Relevance | Medium to high | High (safety-related) | High after long sleep cycles |
| Interference Sensitivity | High (coexistence with cellular) | High (onboard RF and motors) | Medium to high (cellular LPWAN coexistence) |
| Regulatory Focus | RED, EN 303 413, eCall requirements | Operational safety, airspace compliance | Regional market requirements (e.g. NavIC) |
While the table above highlights how GNSS requirements differ across automotive, drone, and IoT applications, manufacturers are often faced with recurring practical questions when preparing products for global markets.
The following FAQ addresses common topics related to regulatory classification, certification obligations, constellation support, and testing expectations for GNSS receivers.
FAQ – GNSS Receivers and Market Access
Do GNSS receivers require radio type approval?
GNSS receivers are passive devices and typically do not require individual frequency licenses or transmitter-related approvals. However, GNSS-enabled products remain subject to general regulatory frameworks covering EMC, safety, and unintentional emissions.
How are GNSS receivers regulated in major markets such as the EU and the US?
In the European Union, GNSS receivers fall under the Radio Equipment Directive and must demonstrate CE conformity, including EMC compliance and, for certain applications, ETSI EN 303 413.
In the United States, pure GNSS receivers generally do not require FCC certification, but devices must comply with FCC Part 15 limits for unintentional radiators.
Are there restrictions on which GNSS constellations may be used?
In most markets, the reception of multiple GNSS constellations such as GPS, Galileo, GLONASS, and BeiDou is permitted. Certain applications mandate specific systems, such as Galileo for European eCall or NavIC for selected Indian products.
Are GNSS receivers subject to EMC and interference testing?
Yes. Even though GNSS receivers are passive, the complete device must comply with applicable EMC limits and demonstrate sufficient immunity to interference, particularly when integrated with cellular, Wi-Fi, or other radio technologies.
Is simulator-based testing required for GNSS receivers?
Simulator-based testing is not always legally mandated, but it is the preferred method for performance validation. GNSS simulators enable controlled, repeatable testing of sensitivity, TTFF, accuracy, and robustness that cannot be reliably achieved with live-sky measurements alone.
When should GNSS compliance be addressed during product development?
GNSS compliance and performance validation should be considered early in the design phase. Antenna design, RF coexistence, and constellation selection directly influence both performance and regulatory conformity.
Looking for GNSS Receiver Testing Support?
Our accredited laboratories support GNSS receiver evaluation using controlled signal simulation, performance testing, and compliance-oriented measurements. This includes sensitivity, TTFF, accuracy validation, interference resilience, and application-specific requirements for automotive and IoT devices.
Further Reading & Official Resources
Selected GNSS Regulations and Technical References
-
ETSI EN 303 413 (Europe, EU)
Performance requirements for GNSS receivers under the Radio Equipment Directive (RED), including receiver blocking and spurious emissions: ETSI (PDF)
-
Radio Equipment Directive (2014/53/EU)
Legal framework governing radio equipment placed on the European market, including GNSS receivers: Official Journal of the European Union
-
ETSI EN 301 489-1
Base EMC standard applicable to radio equipment, including GNSS-enabled devices: ETSI (PDF)
-
47 CFR §15.109 / §15.107 (FCC - USA)
Radiated and conducted emission limits for digital devices incorporating GNSS receivers: eCFR
-
FCC Part 15 (Unintentional Radiators)
Emission limits applicable to GNSS-enabled devices without intentional transmitters: eCFR
GNSS System References
-
European GNSS Service Centre (EUSPA)
Official information on Galileo services, performance characteristics, and application requirements: gsc-europa.eu
-
GPS Interface Specification (IS-GPS)
Public technical specifications defining GPS signal structures and performance: gps.gov
Additional Resource
-
TAMSys by IB-Lenhardt AG – Type Approval Management System
A centralized compliance platform for managing radio certification, regulatory data, and certificate tracking across major markets including the EU, USA, China, Japan, Brazil, and more. → TAMSys – Type Approval Management System
This is a curated selection of key regulatory and technical references. GNSS receivers are subject to fewer formalized standards than active radio transmitters. Manufacturers should always verify current requirements with the relevant authorities and application-specific regulations. All references were verified as of January 2026.
Author: Daniel Lenhardt - CEO & Owner | IB-Lenhardt AG Give feedback on this article