GNSS – 技術とコンプライアンス
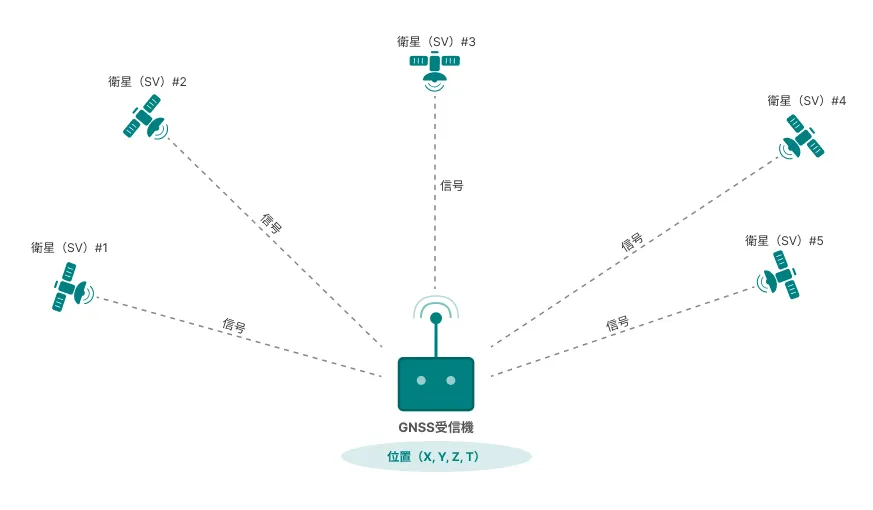
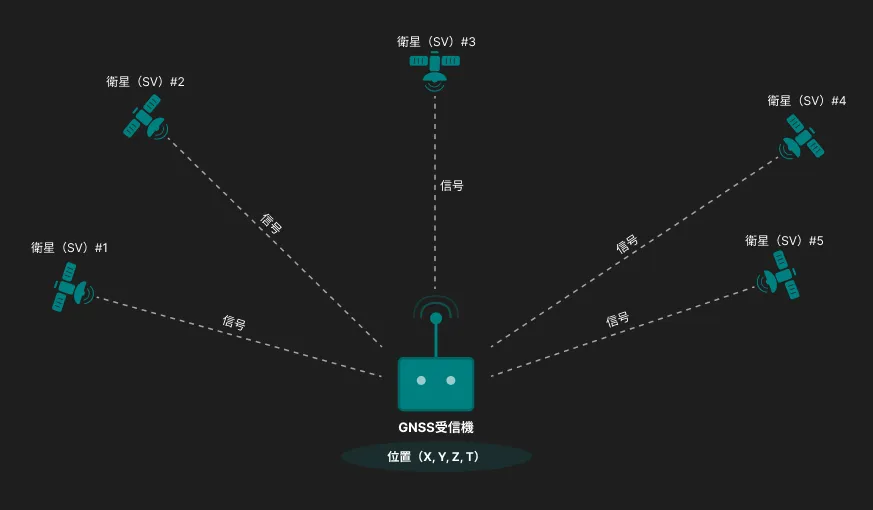
Global Navigation Satellite Systems(GNSS)は、L帯において全地球規模および地域の衛星コンステレーションから送信される信号を受信し、衛星測位・ナビゲーション・時刻同期(PNT)を実現します。
GNSSは受信専用のパッシブ技術であり、自ら無線信号を送信することはありません。その機能は、精密な信号受信、信号処理、およびホスト機器への統合によって成立します。メーカーにとって、安定したGNSS性能の確保とグローバル市場への展開には、再現性のある性能検証と、地域ごとの規制要件および用途固有要件への適合が不可欠です。
GNSS受信機の試験と性能評価
当社は、信号シミュレーション、性能評価、適合性評価を通じて、自動車(eCall)および IoT / Asset Tracking 向けのGNSS受信機試験を支援します。
重要なポイント
GNSS受信機は、約 −130 dBm という極めて微弱な信号を用いた衛星測位および時刻同期に基づいて動作します。そのため、アンテナ設計と信号処理は安定した動作において重要な要素となります。
受信機の性能は、感度(Sensitivity)、Time to First Fix(TTFF)、および測位精度によって定義され、制御された再現性のある試験条件下で評価されます。
シミュレータを用いた試験により、感度、TTFF、動特性、耐干渉性などのGNSS性能を再現性高く評価できます。これは、Live-Sky試験のみでは十分に実現できない評価です。
グローバル市場への展開には、地域ごとの規制枠組みおよび用途固有の要件への適合が不可欠です。例として、ETSI EN 303 413、EU eCall向けのGalileo対応、インド市場におけるNavIC要件などが挙げられます。
GNSS技術の概要
GNSS受信機は、高度約20,000 kmの中軌道(MEO)を周回する衛星から送信される信号を処理します。各GNSSは通常24~35機の衛星から構成される独自の衛星コンステレーションを運用し、定義された周波数帯において符号化された時刻信号を送信します。
最新のGNSS受信機はマルチコンステレーション動作に対応しており、複数の測位衛星システムの信号を同時に利用できます。これにより、測位の可用性が向上し、全体的な測位性能の改善が可能となります。
GNSSの動作原理
以下では、主要なグローバルGNSSコンステレーション、使用される周波数帯、および主な技術的特性について概説します。
グローバルGNSSコンステレーションの概要
| システム | 詳細 |
|---|---|
| GPS (Navstar) |
運用主体 / 地域: 米国(米国宇宙軍) 主な信号: L1, L5 主な特性: 最も長い運用実績を持つグローバルGNSS。世界的な基準システム。民生・軍事サービスに対応し、幅広い機器でサポート |
| Galileo |
運用主体 / 地域: 欧州連合 主な信号: E1, E5 主な特性: 民生用途を重視したシステム。高精度なオープンサービスを提供。EUのeCall用途では必須 |
| GLONASS |
運用主体 / 地域: ロシア連邦 主な信号: G1, G2 主な特性: 全球カバレッジ。周波数分割多元接続(FDMA)方式を採用。GPSと併用されることが多い |
| BeiDou |
運用主体 / 地域: 中国 主な信号: B1, B2 主な特性: 地域拡張を備えたグローバルシステム。アジア太平洋地域での強いカバレッジ。国際的な採用が拡大 |
| NavIC (IRNSS) |
運用主体 / 地域: インド 主な信号: L5, Sバンド 主な特性: 地域システム。インド市場の特定用途で必須。グローバルGNSSを補完 |
| システム | 運用主体 / 地域 | 主な信号(概要) | 主な特性 |
|---|---|---|---|
| GPS (Navstar) | 米国(米国宇宙軍) | L1, L5 | 最も長い運用実績を持つグローバルGNSS。世界的な基準システム。民生・軍事サービスに対応し、幅広い機器でサポート |
| Galileo | 欧州連合 | E1, E5 | 民生用途を重視したシステム。高精度なオープンサービスを提供。EUのeCall用途では必須 |
| GLONASS | ロシア連邦 | G1, G2 | 全球カバレッジ。周波数分割多元接続(FDMA)方式を採用。GPSと併用されることが多い |
| BeiDou | 中国 | B1, B2 | 地域拡張を備えたグローバルシステム。アジア太平洋地域での強いカバレッジ。国際的な採用が拡大 |
| NavIC (IRNSS) | インド | L5, Sバンド | 地域システム。インド市場の特定用途で必須。グローバルGNSSを補完 |
信号と周波数帯
GNSS受信機はL帯で動作し、定義された搬送周波数上で送信されるスペクトラム拡散信号を処理します。これらの信号には高精度な時刻情報が含まれており、受信機は複数の衛星に対する擬似距離を算出できます。使用する周波数帯の選択は、受信機の性能、堅牢性、ならびに規制上の位置付けに直接影響します。
一般的なGNSS周波数帯
| 帯域 / 信号 | 詳細 |
|---|---|
| L1 / E1 |
おおよその周波数: 約1575 MHz 使用例: GPS、Galileo、QZSS 技術的意義: 主要な民生GNSS帯域。最も広い機器対応。測位の基本帯域 |
| L2 |
おおよその周波数: 約1227 MHz 使用例: GPS、GLONASS 技術的意義: マルチバンド受信機で使用される追加周波数 |
| L5 / E5a |
おおよその周波数: 約1176 MHz 使用例: GPS、Galileo、NavIC 技術的意義: 高い信号堅牢性。安全関連および高度な用途で使用 |
| E5b / B2 |
おおよその周波数: 約1207 MHz 使用例: Galileo、BeiDou 技術的意義: Dual-Frequency動作を支援する補完的な高精度帯域 |
| B1 |
おおよその周波数: 約1561 MHz 使用例: BeiDou 技術的意義: 地域およびグローバルで利用されるBeiDouのサービス帯域 |
| Sバンド |
おおよその周波数: 約2492 MHz 使用例: NavIC 技術的意義: インド市場に関連する地域補完帯域 |
| 帯域 / 信号 | おおよその周波数 | 使用例 | 技術的意義 |
|---|---|---|---|
| L1 / E1 | 約1575 MHz | GPS、Galileo、QZSS | 主要な民生GNSS帯域。最も広い機器対応。測位の基本帯域 |
| L2 | 約1227 MHz | GPS、GLONASS | マルチバンド受信機で使用される追加周波数 |
| L5 / E5a | 約1176 MHz | GPS、Galileo、NavIC | 高い信号堅牢性。安全関連および高度な用途で使用 |
| E5b / B2 | 約1207 MHz | Galileo、BeiDou | Dual-Frequency動作を支援する補完的な高精度帯域 |
| B1 | 約1561 MHz | BeiDou | 地域およびグローバルで利用されるBeiDouのサービス帯域 |
| Sバンド | 約2492 MHz | NavIC | インド市場に関連する地域補完帯域 |
Dual-Frequency動作
最新のGNSS受信機は、L1またはE1とL5またはE5を組み合わせたDual-Frequency動作への対応が進んでいます。2つの周波数における信号伝搬を比較することで、電離層遅延の影響を大幅に低減でき、特に厳しい環境下において測位の堅牢性と信頼性が向上します。
GNSS受信機アーキテクチャ
概要
- 信号受信: 微弱な衛星信号(通常−130 dBm)を捕捉し、処理のために増幅
- デジタル処理: 衛星コードを捕捉・追跡してタイミング情報を抽出
- 位置計算: 少なくとも4つの衛星信号から3D位置を計算
- マルチシステム対応: 現代の受信機はGPS、Galileo、GLONASS、BeiDouを同時に処理
ダウンコンバージョン・デジタル化
フィルタリングと増幅の後、受信信号は中間周波数またはベースバンド周波数にダウンコンバートされ、デジタル化されます。このステップは、デジタル領域での相関と追跡のために信号を準備します。
現代のGNSS受信機は、アナログ-デジタル変換器(ADC)を使用して、拡散帯域幅を捕捉するのに十分なレートで信号をデジタル化します(信号タイプに応じて通常2〜40 MHz)。デジタル化された信号は、相関エンジンによって処理され、タイミングとナビゲーションデータが抽出されます。
信号捕捉
捕捉中、受信機は既知のGNSS拡散コードと入力信号を相関させることで、可視衛星を検索します。このプロセスは衛星信号を識別し、コード位相とドップラー周波数の粗い推定値を提供します。
初回位置測位に要する時間(TTFF - Time To First Fix)は、受信機が有効なアルマナックデータと最近の位置情報を持っているかどうかに依存します。コールドスタートシナリオ(事前データなし)では通常30〜60秒を要し、ウォームスタートまたはホットスタートでは数秒以内に位置測位を達成できます。
信号追跡
捕捉後、追跡ループはタイミングと周波数の推定を継続的に改善します。安定した追跡は、衛星とのロックを維持し、変化する信号条件下で正確な疑似距離測定をサポートするために不可欠です。
追跡ループには、コード追跡用の遅延ロックループ(DLL)と、搬送波追跡用の位相ロックループ(PLL)または周波数ロックループ(FLL)が含まれます。これらのループは、受信機の移動や信号フェージング中の安定した動作を維持するために、雑音性能と動的応答のバランスを取る必要があります。
ナビゲーション解
ナビゲーションエンジンは、複数の衛星からの疑似距離測定に基づいて、位置、速度、時刻を計算します。3次元位置と受信機時計オフセットを解決するには、少なくとも4つの衛星が必要です。
疑似距離は、受信機の時計誤差を含む、衛星と受信機間の測定距離を表します。ナビゲーションエンジンは、反復アルゴリズムまたはカルマンフィルタリング技術を使用して、衛星位置、疑似距離、受信機位置を関連付ける方程式系を解きます。
位置精度は、衛星配置、大気遅延、マルチパス伝搬、受信機ノイズに依存します。一般的な単一周波数受信機は、開空条件下で3〜5メートルの精度を達成します。デュアル周波数動作と複数のコンステレーションを使用する高度な受信機は、位置精度と信頼性を大幅に向上させることができます。
高度な機能
マルチコンステレーション処理
現代のGNSS受信機は、複数の衛星システムからの信号を同時に処理し、衛星の可用性と測位の堅牢性を向上させます。GPS、Galileo、GLONASS、BeiDouの信号を組み合わせることで、受信機は特に都市峡谷や樹木の下などの困難な環境において、可視衛星の数を増やします。
マルチコンステレーション動作は、局所的な信号遮蔽への耐性を高め、1つのシステムがサービス中断を経験した場合の冗長性を提供します。複数のコンステレーションの使用は、Galileoサポートを必要とする欧州のeCallシステムなど、特定のアプリケーションではますます必須となっています。
デュアル周波数動作
デュアル周波数受信機は、2つの周波数帯域(通常L1/E1とL5/E5)の信号を処理して、電離層遅延誤差を除去します。異なる周波数間での信号伝搬時間を比較することで、受信機は電離層歪みを計算して除去でき、外部補正データを必要とせずに位置精度を大幅に向上させます。
この機能は、電離層活動が高い環境や、大気条件に関係なく一貫した精度を必要とするアプリケーションで特に価値があります。
共存と統合の考慮事項
GNSS受信機は、セルラー、Wi-Fi、Bluetooth、UWB無線も含むデバイスに統合されることが一般的です。特にGNSSアンテナとフロントエンド部品がアクティブな無線の近くに配置される場合、近くの送信機による感度低下を避けるために、慎重なRF設計が必要です。
主な統合上の課題には以下が含まれます:
- 帯域外干渉: 隣接周波数帯域の強力な送信機(例:2100 MHz付近のLTE Band 1)は、GNSS帯域内に入る高調波や相互変調積を生成する可能性があります
- フロントエンド過負荷: 高出力送信は、干渉信号が帯域外であっても、GNSS LNAを飽和させ、感度を低下させる可能性があります
- アンテナ結合: GNSSと他の無線アンテナ間の不十分な絶縁は、干渉信号の直接結合を引き起こす可能性があります
干渉緩和戦略には、アンテナの空間的分離、周波数計画、送信バースト中の時間領域ブランキング、デジタル領域での適応フィルタリングが含まれます。実際の展開シナリオでの信頼性の高いGNSS動作を確保するために、共存性能のテストが不可欠です。
→ 性能検証と適合性試験は、制御された測定シナリオを通じてこれらの統合上の課題に対処します。評価方法と規制要件の詳細なガイダンスについては、GNSS受信機試験を参照してください。
性能パラメータおよび評価指標
GNSS受信機の性能は、実環境条件下において衛星信号をどれだけ確実に取得・追尾し、正確な位置・速度・時刻(PVT)情報へ変換できるかによって定義されます。GNSS信号は極めて低い信号レベルで受信されるため、性能評価は明確に定義され、かつ再現性のある指標に基づいて実施する必要があります。
以下のパラメータは、自動車システム、IoTトラッキング機器、安全関連の測位機能などの用途において、GNSS受信機性能を評価するために一般的に使用されます。
感度
感度は、GNSS受信機が衛星信号を正常に取得または追尾できる最小の信号レベルを示します。
通常、以下の2つの感度指標が区別されます。
取得感度(Acquisition Sensitivity)
衛星信号を検出・取得し、初回の測位(Initial Position Fix)を達成できる最小の信号レベル。追尾感度(Tracking Sensitivity)
すでに取得された衛星信号に対して、受信機が安定して追尾(ロックを維持)できる最小の信号レベル。
追尾感度は一般に取得感度よりも数デシベル良好であり、都市部のビル街、建物近傍、樹木下など、信号減衰が発生する環境において安定した動作を確保するために重要となります。
初回測位時間(Time to First Fix, TTFF)
Time to First Fix(TTFF)は、電源投入またはリセット後に、GNSS受信機が初めて有効な位置解を算出するまでに要する時間を示します。
TTFFは、受信機の状態および利用可能な補助データに大きく依存します。
Cold Start
有効なアルマナック、エフェメリス、または過去の位置情報が利用できない状態。一般的なTTFFは30~60秒程度です。Warm Start
アルマナックデータおよび概略位置情報は利用可能だが、エフェメリスが古い状態。TTFFは通常、数秒程度に短縮されます。Hot Start
有効なエフェメリスおよび最新の位置情報が利用可能な状態。通常、1~2秒以内に測位が完了します。
TTFFは、ユーザー体験における重要な性能指標であり、電源投入後に迅速な測位が求められる用途において特に重要となります。
測位精度
測位精度は、受信機が算出した位置と実際の位置との偏差を示します。通常、定義された試験条件下における水平誤差および垂直誤差として表されます。
測位精度は、以下のような複数の要因によって影響を受けます。
衛星幾何配置(Dilution of Precision)
大気遅延(電離層および対流圏)
マルチパス伝搬
受信機ノイズおよび信号処理アルゴリズム
開空間条件下では、単一周波数受信機は通常、数メートル程度の水平精度を達成します。マルチコンステレーションおよびデュアル周波数受信機では、特に厳しい環境下において、測位精度およびロバスト性を大幅に向上させることが可能です。
ロバスト性および耐干渉性
ロバスト性は、信号劣化や干渉が存在する状況下においても、GNSS受信機が測位性能を維持できる能力を示します。
主な評価観点は以下のとおりです。
インバンドおよびアウトオブバンド干渉に対する耐性
同一機器内の隣接無線送信機に対する許容性
車両走行や信号フェージングなどの動的条件下での安定性
耐干渉性は、GNSSを携帯通信、Wi-Fi、その他の無線技術と統合したデバイスにおいて、特に重要な要素となります。
試験および検証手法
GNSS受信機の試験は、制御された再現性のある条件下で性能パラメータを検証することに重点を置いています。GNSS信号は極めて微弱であり、実環境では周囲条件を制御できないため、信頼性の高い性能検証およびコンプライアンス評価には、ラボ環境での試験が不可欠です。
試験手法は、開発段階、用途コンテキスト、ならびに規制要件に応じて選定されます。
シミュレータベース試験
GNSSシミュレータは、現実的な衛星信号を生成し、信号パラメータ、衛星幾何配置、環境条件を精密に制御することを可能にします。これにより、ライブスカイ測定では実現できない再現性の高い試験が可能となります。
代表的なシミュレータベース試験シナリオには、以下が含まれます。
衛星可視性および衛星幾何配置の制御
感度評価のための信号電力レベルの可変設定
Cold / Warm / Hot Start におけるTTFF評価
移動プロファイルを設定した動的シナリオ
マルチコンステレーションおよびマルチ周波数動作の評価
シミュレータ試験は、性能特性評価、回帰試験、および認証関連測定において、最も重要な試験手法とされています。
ライブスカイ試験
ライブスカイ試験は、屋外環境に設置したアンテナを通じて、実際の衛星信号を受信する試験手法です。現実的な運用条件を再現できますが、再現性および制御性には限界があります。
ライブスカイ試験は、主に以下の目的で使用されます。
開発段階における機能検証
統合デバイスのフィールド検証
ユーザー体験の評価
衛星幾何配置、干渉、気象条件などの外部要因を制御できないため、ライブスカイ試験のみを性能検証やコンプライアンス証拠の根拠とすることは適していません。
感度およびTTFF評価
感度およびTTFFの測定は、一貫性と再現性を確保するため、一般的にGNSSシミュレータを用いて実施されます。
代表的な評価手法には、以下が含まれます。
信号レベルを段階的に減衰させ、取得および追尾の閾値を特定
Cold / Warm / Hot Start 条件を定義したTTFF測定
対応する衛星コンステレーションおよび周波数帯全体での検証
これらの測定は、前章で定義した性能パラメータを直接的に裏付けるものです。
干渉およびロバスト性試験
ロバスト性試験では、信号劣化や干渉源が存在する状況下での受信機性能を評価します。
主な試験観点は以下のとおりです。
インバンドおよびアウトオブバンド干渉の注入
隣接送信機との共存シナリオ
信号遮断およびフェージングのシミュレーション
移動および電源変動条件下での動的ストレス試験
これらの試験は、GNSSを携帯通信、Wi-Fi、その他の無線技術と統合したデバイスにおいて、特に重要となります。
コンプライアンス指向の試験
特定の用途や市場においては、GNSS受信機が定義された性能要件および放射要件への適合を示す必要があります。
例として、以下が挙げられます。
欧州市場向け ETSI EN 303 413 に基づく性能検証
受信機ブロッキング特性およびスプリアス放射の検証
試験条件、不確かさ、再現性に関する文書化
コンプライアンス指向の試験は、シミュレータベース試験を基盤とし、追跡可能で十分に文書化された試験手順が求められます。
規制要件および用途固有要件
GNSS受信機は、自ら無線信号を送信しない受信専用のパッシブ無線機器です。そのため、多くの市場において、個別の周波数ライセンスや無線機器の型式認証は原則として不要とされています。
ただし、GNSS受信機は、無線機器規制、電磁両立性(EMC)、および用途固有要件を含む地域ごとの規制枠組みの適用対象となります。さらに、一部の市場では、安全関連用途や国によって規制されたユースケースにおいて、特定の衛星システムへの対応が義務付けられています。
以下では、GNSS受信機の統合およびグローバル市場への展開に関連する主要な規制上の考慮事項を整理しています。
| 地域 | 詳細 |
|---|---|
| EU |
規制上の位置付け: GNSS受信機は、無線機器指令(Radio Equipment Directive, RED)に基づき無線機器として扱われます。個別の無線ライセンスは不要ですが、効率的な周波数利用およびEMC適合を含むCE適合が必須です(例:ETSI EN 303 413)。 GNSS利用に関する制限: GNSSの利用に制限はなく、主要な衛星システムはすべて受信可能です。 用途固有の要件: 車両のeCallシステムではGalileo対応が必須。緊急通報サービス(例:E112 / AML)においてもGalileoの重要性が高まっています。 |
| 米国 |
規制上の位置付け: パッシブなGNSS受信機は、意図的な送信を行わない限りFCC認証は不要です。ただし、非意図的放射源としてFCC Part 15の要件に適合する必要があります。 GNSS利用に関する制限: GPSおよびGalileoの受信は明示的に認められています。GLONASSおよびBeiDouの受信も現在は容認されており、正式な禁止規定は存在しません。 用途固有の要件: 民生機器に対するマルチGNSSの義務要件はありません。規制上の焦点は放射および干渉に置かれています。 |
| カナダ |
規制上の位置付け: 米国と同様に、パッシブGNSS受信機に対する特定の無線認証は不要です。機器は一般的なEMC要件(ICES-003)に適合する必要があります。 GNSS利用に関する制限: 外国GNSSシステムの利用に制限はありません。 用途固有の要件: 特定のコンステレーション要件はなく、マルチGNSSの利用が一般的です。 |
| 日本 |
規制上の位置付け: 純粋なGNSS受信機は無線認証(技適)を必要とせず、GNSSはパッシブ受信として扱われます。 GNSS利用に関する制限: GNSSの利用に制限はなく、外国の衛星システムも認められています。 用途固有の要件: 地域測位衛星システムであるQZSSが広くサポートされており、GPSや他のGNSSと併用されるのが一般的です。 |
| 中国 |
規制上の位置付け: GNSS受信機に対する専用の無線ライセンスは不要です。一般的なEMC適合が適用されます。 GNSS利用に関する制限: GPS、Galileo、GLONASSの受信に対する正式な禁止はありません。 用途固有の要件: BeiDou対応が強く推奨されており、公共分野や政府関連用途では必須となる場合があります。 |
| ロシア |
規制上の位置付け: GNSS受信機に対する個別の無線ライセンスは不要です。市場投入には、機器全体としてのEAC適合が通常求められます。 GNSS利用に関する制限: GNSSの利用に制限はありません。 用途固有の要件: ロシアで販売されるナビゲーション機器ではGLONASS対応が必須であり、ERA-GLONASSなどのシステムで要求されます。 |
| インド |
規制上の位置付け: GNSS受信機に対する個別の無線認証は不要です。一般的なEMC要件が適用されます。 GNSS利用に関する制限: 外国GNSSシステムの利用に制限はありません。 用途固有の要件: NavIC対応が段階的に義務化されており、スマートフォンや特定のナビゲーション用途で要件が公表されています。 |
| その他の市場 |
規制上の位置付け: GNSS受信機は一般にパッシブ無線機器として扱われ、個別のライセンスは不要です。 GNSS利用に関する制限: 通常、GNSSの利用に制限はありません。 用途固有の要件: 地域独自の衛星システムが推奨される場合があります。一般的なEMCおよび製品安全規制が適用されます。 |
| 地域 | GNSS受信機の規制上の位置付け | GNSS利用に関する制限 | 用途固有の要件 |
|---|---|---|---|
| EU | GNSS受信機は、無線機器指令(Radio Equipment Directive, RED)に基づき無線機器として扱われます。個別の無線ライセンスは不要ですが、効率的な周波数利用およびEMC適合を含むCE適合が必須です(例:ETSI EN 303 413)。 | GNSSの利用に制限はなく、主要な衛星システムはすべて受信可能です。 | 車両のeCallシステムではGalileo対応が必須。緊急通報サービス(例:E112 / AML)においてもGalileoの重要性が高まっています。 |
| 米国 | パッシブなGNSS受信機は、意図的な送信を行わない限りFCC認証は不要です。ただし、非意図的放射源としてFCC Part 15の要件に適合する必要があります。 | GPSおよびGalileoの受信は明示的に認められています。GLONASSおよびBeiDouの受信も現在は容認されており、正式な禁止規定は存在しません。 | 民生機器に対するマルチGNSSの義務要件はありません。規制上の焦点は放射および干渉に置かれています。 |
| カナダ | 米国と同様に、パッシブGNSS受信機に対する特定の無線認証は不要です。機器は一般的なEMC要件(ICES-003)に適合する必要があります。 | 外国GNSSシステムの利用に制限はありません。 | 特定のコンステレーション要件はなく、マルチGNSSの利用が一般的です。 |
| 日本 | 純粋なGNSS受信機は無線認証(技適)を必要とせず、GNSSはパッシブ受信として扱われます。 | GNSSの利用に制限はなく、外国の衛星システムも認められています。 | 地域測位衛星システムであるQZSSが広くサポートされており、GPSや他のGNSSと併用されるのが一般的です。 |
| 中国 | GNSS受信機に対する専用の無線ライセンスは不要です。一般的なEMC適合が適用されます。 | GPS、Galileo、GLONASSの受信に対する正式な禁止はありません。 | BeiDou対応が強く推奨されており、公共分野や政府関連用途では必須となる場合があります。 |
| ロシア | GNSS受信機に対する個別の無線ライセンスは不要です。市場投入には、機器全体としてのEAC適合が通常求められます。 | GNSSの利用に制限はありません。 | ロシアで販売されるナビゲーション機器ではGLONASS対応が必須であり、ERA-GLONASSなどのシステムで要求されます。 |
| インド | GNSS受信機に対する個別の無線認証は不要です。一般的なEMC要件が適用されます。 | 外国GNSSシステムの利用に制限はありません。 | NavIC対応が段階的に義務化されており、スマートフォンや特定のナビゲーション用途で要件が公表されています。 |
| その他の市場 | GNSS受信機は一般にパッシブ無線機器として扱われ、個別のライセンスは不要です。 | 通常、GNSSの利用に制限はありません。 | 地域独自の衛星システムが推奨される場合があります。一般的なEMCおよび製品安全規制が適用されます。 |
まとめと実務上のポイント
GNSS受信機は、一般に個別の無線ライセンスを必要としませんが、地域ごとの無線機器規制およびEMC規制への適合が求められます。
規制要件は、衛星信号の受信そのものではなく、放射特性、周波数利用効率、ならびに機器レベルでの適合性に重点が置かれています。
用途固有の義務要件は市場アクセスにおいて重要な役割を果たします。例として、EUにおけるeCall向けGalileo対応、ロシアにおけるGLONASS、インドにおけるNavIC対応が挙げられます。
メーカーは、対応するGNSSコンステレーションを明確に文書化するとともに、製品開発段階において地域ごとの用途要件への適合を検証することが重要です。
実用アプリケーション例
GNSS受信機に対する要件は、用途コンテキストによって大きく異なります。基盤となる測位技術は共通である一方、性能に対する期待値、規制上の制約、検証の優先事項は業界ごとに異なります。以下の例では、代表的な実運用シナリオにおけるGNSSの活用方法と、特に重要となる技術的およびコンプライアンス上の観点を示します。
自動車用途
自動車分野において、GNSSはナビゲーション、フリートサービス、運転支援、緊急通報システムなどに使用される、安全性および機能上重要なコンポーネントです。
代表的なユースケース
ターンバイターン方式のナビゲーションおよび地図連動サービス
緊急通報システム(eCall / ERA-GLONASS)
フリートトラッキングおよびテレマティクス
先進運転支援システム(ADAS)の補助機能
主要な技術要件
都市環境やトンネル内における高い可用性
車両始動後の高速かつ信頼性の高いTTFF
動的走行条件および信号遮断下での安定した追尾性能
衛星可視性向上のためのマルチコンステレーション対応
規制および試験の重点
EU eCall向けのGalileo対応義務
ロシア市場向け自動車用途におけるGLONASS対応
ETSI EN 303 413に基づく性能検証
安全関連シナリオに対する再現性の高いシミュレータ試験
ドローンおよびUAV用途
GNSSは、無人航空機(UAV)において、ナビゲーション、姿勢安定、ジオフェンシング、自律飛行機能を実現する中核技術です。
代表的なユースケース
位置保持およびウェイポイント航法
自律飛行およびリターントゥホーム機能
ジオフェンシングおよび空域コンプライアンス
測量、マッピング、点検用途
主要な技術要件
高い測位精度および低遅延
高ダイナミクスおよび急激な姿勢変化下での信頼性
機内無線機器やモータからの干渉に対する耐性
精度向上のためのマルチバンドおよびデュアル周波数対応
規制および試験の重点
飛行安全性に関わるGNSS性能の検証
動的モーションプロファイル下での検証
RF送信機との干渉および共存試験
業務用UAVにおけるデュアル周波数GNSSの重要性の高まり
IoTおよびアセットトラッキング用途
IoTデバイスでは、GNSSはアセットトラッキング、物流、監視用途に広く使用されており、消費電力やサイズに厳しい制約が課されることが一般的です。
代表的なユースケース
資産およびコンテナのトラッキング
スマートロジスティクスおよびサプライチェーン監視
野生動物および家畜の追跡
インフラ監視および時刻同期
主要な技術要件
低消費電力および効率的なデューティサイクル制御
低信号レベルでの確実な捕捉性能
長時間スリープ後でも許容可能なTTFF
小型アンテナおよびRFフロントエンドの統合設計
規制および試験の重点
低消費電力条件下での感度および追尾性能
携帯通信(LTE-M、NB-IoT)およびLPWAN無線との共存
Cold Start条件におけるTTFF検証
インド市場向けNavIC対応などの地域要件
用途横断的な考慮事項
すべての用途分野に共通して、GNSSの性能およびコンプライアンスは、制御され再現性のある検証に依存します。
シミュレータ試験により、感度、TTFF、測位精度を一貫して評価可能
マルチコンステレーション対応は、厳しい環境下でのロバスト性を向上
規制要件は、対応すべきGNSSコンステレーションにますます影響を与えている
GNSSが他の無線技術と併用される場合、統合試験が不可欠
GNSSアプリケーション比較
| 観点 | 詳細 |
|---|---|
| 自動車 |
主な用途: ナビゲーション、eCall、テレマティクス 性能上の優先事項: 可用性およびロバスト性 典型的なGNSS構成: マルチコンステレーション、デュアル周波数対応が増加 TTFFの重要度: 中~高 干渉に対する感受性: 高(携帯通信との共存) 規制上の重点: RED、EN 303 413、eCall要件 |
| ドローン / UAV |
主な用途: 飛行制御、測位、ジオフェンシング 性能上の優先事項: 測位精度および動的応答性 典型的なGNSS構成: マルチコンステレーション、デュアル周波数が一般的 TTFFの重要度: 高(安全関連) 干渉に対する感受性: 高(機内RFおよびモータによる影響) 規制上の重点: 運用安全性、空域コンプライアンス |
| IoT / アセットトラッキング |
主な用途: アセットトラッキング、物流、監視 性能上の優先事項: 電力効率および感度 典型的なGNSS構成: 単一またはマルチコンステレーション、単一周波数が主流 TTFFの重要度: 長時間スリープ後に高 干渉に対する感受性: 中~高(セルラー/LPWANとの共存) 規制上の重点: 地域市場要件(例:NavIC) |
| 観点 | 自動車 | ドローン / UAV | IoT / アセットトラッキング |
|---|---|---|---|
| 主な用途 | ナビゲーション、eCall、テレマティクス | 飛行制御、測位、ジオフェンシング | アセットトラッキング、物流、監視 |
| 性能上の優先事項 | 可用性およびロバスト性 | 測位精度および動的応答性 | 電力効率および感度 |
| 典型的なGNSS構成 | マルチコンステレーション、デュアル周波数対応が増加 | マルチコンステレーション、デュアル周波数が一般的 | 単一またはマルチコンステレーション、単一周波数が主流 |
| TTFFの重要度 | 中~高 | 高(安全関連) | 長時間スリープ後に高 |
| 干渉に対する感受性 | 高(携帯通信との共存) | 高(機内RFおよびモータによる影響) | 中~高(セルラー/LPWANとの共存) |
| 規制上の重点 | RED、EN 303 413、eCall要件 | 運用安全性、空域コンプライアンス | 地域市場要件(例:NavIC) |
上記の表では、自動車、ドローン、IoT用途におけるGNSS要件の違いを示しましたが、グローバル市場向けに製品を準備する際、メーカーは共通する実務的な疑問に直面することが少なくありません。
以下のFAQでは、GNSS受信機に関する規制上の分類、認証義務、対応すべき衛星コンステレーション、ならびに試験および検証に対する一般的な期待事項について、よくある質問を整理しています。
FAQ – GNSS受信機および市場アクセス
GNSS受信機には無線の型式認証が必要ですか?
GNSS受信機はパッシブデバイスであり、通常、個別の周波数ライセンスや送信機に関連する認証は不要です。ただし、GNSS機能を搭載した製品全体としては、EMC、安全性、非意図的放射に関する一般的な規制枠組みの適用を受けます。
EUや米国などの主要市場では、GNSS受信機はどのように規制されていますか?
欧州連合(EU)では、GNSS受信機は無線機器指令(Radio Equipment Directive, RED)の対象となり、EMC適合を含むCE適合を示す必要があります。特定の用途では、ETSI EN 303 413への適合が求められます。
米国では、純粋なGNSS受信機は通常FCC認証を必要としませんが、機器は非意図的放射源としてFCC Part 15の制限値に適合する必要があります。
使用できるGNSSコンステレーションに制限はありますか?
多くの市場では、GPS、Galileo、GLONASS、BeiDouなど、複数のGNSSコンステレーションの受信が認められています。ただし、用途によっては特定のシステムが義務付けられる場合があります。例として、欧州のeCallにおけるGalileo対応や、インドの一部製品におけるNavIC対応が挙げられます。
GNSS受信機はEMCおよび耐干渉試験の対象となりますか?
はい。GNSS受信機自体はパッシブであっても、製品全体としては適用されるEMC規制に適合し、十分な耐干渉性を示す必要があります。特に、携帯通信、Wi-Fi、その他の無線技術と統合されている場合には重要となります。
GNSS受信機にはシミュレータベース試験が必要ですか?
シミュレータベース試験は常に法的に義務付けられているわけではありませんが、性能検証において最も有効な手法とされています。GNSSシミュレータを用いることで、感度、TTFF、測位精度、ロバスト性を制御された再現性のある条件下で評価でき、ライブスカイ試験のみでは信頼性の高い検証が困難な項目をカバーできます。
製品開発のどの段階でGNSSコンプライアンスを考慮すべきですか?
GNSSコンプライアンスおよび性能検証は、設計初期段階から考慮すべきです。アンテナ設計、RF共存設計、対応するGNSSコンステレーションの選定は、性能だけでなく規制適合性にも直接的な影響を与えます。
Looking for GNSS Receiver Testing Support?
Our accredited laboratories support GNSS receiver evaluation using controlled signal simulation, performance testing, and compliance-oriented measurements. This includes sensitivity, TTFF, accuracy validation, interference resilience, and application-specific requirements for automotive and IoT devices.
Further Reading & Official Resources
Selected GNSS Regulations and Technical References
-
ETSI EN 303 413 (Europe, EU)
Performance requirements for GNSS receivers under the Radio Equipment Directive (RED), including receiver blocking and spurious emissions: ETSI (PDF)
-
Radio Equipment Directive (2014/53/EU)
Legal framework governing radio equipment placed on the European market, including GNSS receivers: Official Journal of the European Union
-
ETSI EN 301 489-1
Base EMC standard applicable to radio equipment, including GNSS-enabled devices: ETSI (PDF)
-
47 CFR §15.109 / §15.107 (FCC - USA)
Radiated and conducted emission limits for digital devices incorporating GNSS receivers: eCFR
-
FCC Part 15 (Unintentional Radiators)
Emission limits applicable to GNSS-enabled devices without intentional transmitters: eCFR
GNSS System References
-
European GNSS Service Centre (EUSPA)
Official information on Galileo services, performance characteristics, and application requirements: gsc-europa.eu
-
GPS Interface Specification (IS-GPS)
Public technical specifications defining GPS signal structures and performance: gps.gov
Additional Resource
-
TAMSys by IB-Lenhardt AG – Type Approval Management System
A centralized compliance platform for managing radio certification, regulatory data, and certificate tracking across major markets including the EU, USA, China, Japan, Brazil, and more. → TAMSys – Type Approval Management System
This is a curated selection of key regulatory and technical references. GNSS receivers are subject to fewer formalized standards than active radio transmitters. Manufacturers should always verify current requirements with the relevant authorities and application-specific regulations. All references were verified as of January 2026.
著者: Daniel Lenhardt - CEO & Owner | IB-Lenhardt AG この記事にフィードバックを送る