GNSS – Technologie und Konformität
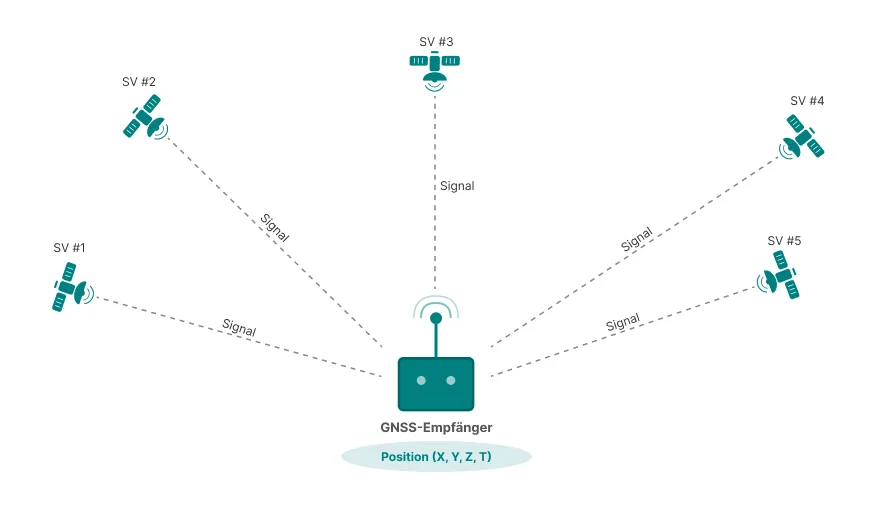
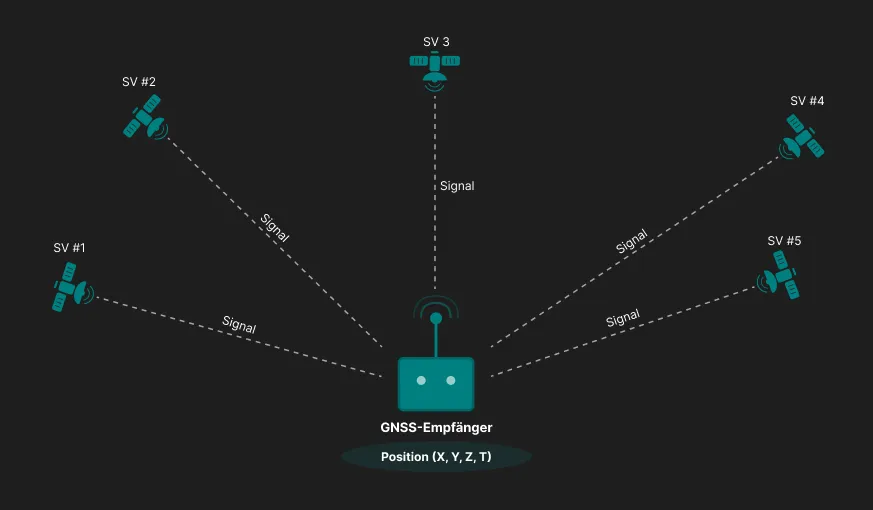
Globale Navigationssatellitensysteme (Global Navigation Satellite Systems, GNSS) ermöglichen satellitengestützte Positions-, Navigations- und Zeitbestimmung (Positioning, Navigation and Timing – PNT) durch den Empfang von Signalen globaler und regionaler Satellitenkonstellationen im L-Band.
GNSS ist eine passive Empfangstechnologie und sendet selbst keine Funksignale aus. Die Funktionalität basiert auf präziser Signalaufnahme, Signalverarbeitung und Integration in das jeweilige Endgerät. Für Hersteller erfordern zuverlässige GNSS-Performance und globaler Marktzugang eine reproduzierbare Leistungsvalidierung sowie die Einhaltung regionaler regulatorischer und anwendungsspezifischer Anforderungen.
GNSS-Empfängertests für Ihr Produkt
Wir unterstützen die Prüfung von GNSS-Empfängern durch Signalsimulation, Leistungsbewertung und Konformitätsprüfungen für Anwendungen in den Bereichen Automotive / eCall sowie IoT / Asset Tracking.
Wichtige Punkte
GNSS-Empfänger basieren auf satellitengestützter Positions- und Zeitbestimmung mit extrem schwachen Signalen (etwa −130 dBm). Antennendesign und Signalverarbeitung sind daher entscheidend für einen zuverlässigen Betrieb.
Die Empfängerleistung wird durch Sensitivität, Time to First Fix (TTFF) und Positionsgenauigkeit unter kontrollierten und reproduzierbaren Testbedingungen definiert.
Simulatorbasierte Tests ermöglichen eine reproduzierbare Bewertung der GNSS-Performance, einschließlich Sensitivität, TTFF, Dynamik und Störfestigkeit, die über die Möglichkeiten von Live-Sky-Tests hinausgeht.
Der globale Marktzugang hängt von der Einhaltung regionaler regulatorischer Rahmenbedingungen und anwendungsspezifischer Vorgaben ab, etwa ETSI EN 303 413, der Galileo-Unterstützung für EU-eCall oder NavIC-Anforderungen in Indien.
GNSS-Technologie
GNSS-Empfänger verarbeiten Signale von Satelliten in mittlerer Erdumlaufbahn in einer Höhe von etwa 20 000 km. Jedes GNSS betreibt eine eigene Satellitenkonstellation mit typischerweise 24 bis 35 Satelliten und sendet codierte Zeitsignale auf definierten Frequenzbändern.
Moderne Empfänger unterstützen den Mehrkonstellationsbetrieb. Die gleichzeitige Nutzung mehrerer GNSS-Systeme verbessert die Verfügbarkeit und die Gesamtleistung der Positionsbestimmung.
Positionsbestimmung mit GNSS
Die folgenden Abschnitte geben einen Überblick über die wichtigsten globalen GNSS-Konstellationen, genutzte Frequenzbänder und zentrale technische Eigenschaften.
Globale GNSS-Konstellationen
| System | Details |
|---|---|
| GPS (Navstar) |
Betreiber / Region: Vereinigte Staaten (US Space Force) Primäre Signale: L1, L5 Zentrale Eigenschaften: Ältestes globales GNSS; weltweites Basissystem; zivile und militärische Dienste; breite Geräteunterstützung |
| Galileo |
Betreiber / Region: Europäische Union Primäre Signale: E1, E5 Zentrale Eigenschaften: Zivil ausgerichtetes System; hochgenauer Open Service; verpflichtend für EU-eCall-Anwendungen |
| GLONASS |
Betreiber / Region: Russische Föderation Primäre Signale: G1, G2 Zentrale Eigenschaften: Globale Abdeckung; Frequenzmultiplex (FDMA); häufig in Kombination mit GPS |
| BeiDou |
Betreiber / Region: China Primäre Signale: B1, B2 Zentrale Eigenschaften: Globales System mit regionaler Erweiterung; starke Abdeckung im asiatisch-pazifischen Raum; zunehmende internationale Nutzung |
| NavIC (IRNSS) |
Betreiber / Region: Indien Primäre Signale: L5, S-Band Zentrale Eigenschaften: Regionales System; für bestimmte Anwendungen im indischen Markt verpflichtend; Ergänzung zu globalen GNSS |
| System | Betreiber / Region | Primäre Signale (Übersicht) | Zentrale Eigenschaften |
|---|---|---|---|
| GPS (Navstar) | Vereinigte Staaten (US Space Force) | L1, L5 | Ältestes globales GNSS; weltweites Basissystem; zivile und militärische Dienste; breite Geräteunterstützung |
| Galileo | Europäische Union | E1, E5 | Zivil ausgerichtetes System; hochgenauer Open Service; verpflichtend für EU-eCall-Anwendungen |
| GLONASS | Russische Föderation | G1, G2 | Globale Abdeckung; Frequenzmultiplex (FDMA); häufig in Kombination mit GPS |
| BeiDou | China | B1, B2 | Globales System mit regionaler Erweiterung; starke Abdeckung im asiatisch-pazifischen Raum; zunehmende internationale Nutzung |
| NavIC (IRNSS) | Indien | L5, S-Band | Regionales System; für bestimmte Anwendungen im indischen Markt verpflichtend; Ergänzung zu globalen GNSS |
Signale und Frequenzbänder
GNSS-Empfänger arbeiten im L-Band und verarbeiten Spread-Spectrum-Signale auf definierten Trägerfrequenzen. Diese Signale enthalten präzise Zeitinformationen, anhand derer der Empfänger Pseudostrecken zu mehreren Satelliten berechnet. Die Wahl der Frequenzbänder beeinflusst direkt Leistungsfähigkeit, Robustheit und regulatorische Relevanz des Empfängers.
Gängige GNSS-Frequenzbänder
| Band / Signal | Details |
|---|---|
| L1 / E1 |
Ungefähre Frequenz: ~1575 MHz Genutzt von: GPS, Galileo, QZSS Technische Bedeutung: Zentrales ziviles GNSS-Band; größte Geräteunterstützung; Basis für die Positionsbestimmung |
| L2 |
Ungefähre Frequenz: ~1227 MHz Genutzt von: GPS, GLONASS Technische Bedeutung: Zusatzband in Mehrband-Empfängern |
| L5 / E5a |
Ungefähre Frequenz: ~1176 MHz Genutzt von: GPS, Galileo, NavIC Technische Bedeutung: Höhere Signalrobustheit; genutzt für sicherheitsrelevante und anspruchsvolle Anwendungen |
| E5b / B2 |
Ungefähre Frequenz: ~1207 MHz Genutzt von: Galileo, BeiDou Technische Bedeutung: Präzisionsband zur Unterstützung des Dual-Frequency-Betriebs |
| B1 |
Ungefähre Frequenz: ~1561 MHz Genutzt von: BeiDou Technische Bedeutung: Dienstband mit regionaler und globaler Relevanz |
| S-Band |
Ungefähre Frequenz: ~2492 MHz Genutzt von: NavIC Technische Bedeutung: Regionales Ergänzungsband mit Bedeutung für den indischen Markt |
| Band / Signal | Ungefähre Frequenz | Genutzt von (Beispiele) | Technische Bedeutung |
|---|---|---|---|
| L1 / E1 | ~1575 MHz | GPS, Galileo, QZSS | Zentrales ziviles GNSS-Band; größte Geräteunterstützung; Basis für die Positionsbestimmung |
| L2 | ~1227 MHz | GPS, GLONASS | Zusatzband in Mehrband-Empfängern |
| L5 / E5a | ~1176 MHz | GPS, Galileo, NavIC | Höhere Signalrobustheit; genutzt für sicherheitsrelevante und anspruchsvolle Anwendungen |
| E5b / B2 | ~1207 MHz | Galileo, BeiDou | Präzisionsband zur Unterstützung des Dual-Frequency-Betriebs |
| B1 | ~1561 MHz | BeiDou | Dienstband mit regionaler und globaler Relevanz |
| S-Band | ~2492 MHz | NavIC | Regionales Ergänzungsband mit Bedeutung für den indischen Markt |
Dual-Frequency-Betrieb
Moderne GNSS-Empfänger unterstützen zunehmend den Dual-Frequency-Betrieb, meist durch die Kombination von L1 oder E1 mit L5 oder E5. Durch den Vergleich der Signalausbreitung auf zwei Frequenzen lassen sich ionosphärische Laufzeitfehler deutlich reduzieren. Dies verbessert die Robustheit und Zuverlässigkeit der Positionsbestimmung, insbesondere in anspruchsvollen Umgebungen.
GNSS-Empfängerarchitektur
Kurzübersicht
- Signalempfang: Erfasst schwache Satellitensignale (typischerweise −130 dBm) und verstärkt sie für die Verarbeitung
- Digitale Verarbeitung: Erfasst und verfolgt Satellitencodes zur Extraktion von Zeitinformationen
- Positionsberechnung: Berechnet 3D-Position aus mindestens vier Satellitensignalen
- Multi-System-Unterstützung: Moderne Empfänger verarbeiten GPS, Galileo, GLONASS und BeiDou gleichzeitig
Abwärtsmischung & Digitalisierung
Nach Filterung und Verstärkung werden die empfangenen Signale auf eine Zwischen- oder Basisfrequenz abwärtsgemischt und digitalisiert. Dieser Schritt bereitet das Signal für die Korrelation und Verfolgung im digitalen Bereich vor.
Moderne GNSS-Empfänger verwenden Analog-Digital-Wandler (ADCs) zur Digitalisierung von Signalen mit Raten, die ausreichen, um die Spreizungsbandbreite zu erfassen (typischerweise 2–40 MHz je nach Signaltyp). Die digitalisierten Signale werden dann von Korrelations-Engines verarbeitet, um Zeit- und Navigationsdaten zu extrahieren.
Signalerfassung
Während der Erfassung sucht der Empfänger nach sichtbaren Satelliten, indem er eingehende Signale mit bekannten GNSS-Spreizcodes korreliert. Dieser Prozess identifiziert Satellitensignale und liefert grobe Schätzungen der Codephase und Dopplerfrequenz.
Die Zeit bis zum ersten Positionsfix (TTFF – Time To First Fix) hängt davon ab, ob der Empfänger über gültige Almanach-Daten und aktuelle Positionsinformationen verfügt. Kaltstartszenarien (keine vorherigen Daten) benötigen typischerweise 30–60 Sekunden, während Warm- oder Heißstarts Positionsfixes innerhalb von Sekunden erreichen können.
Signalverfolgung
Nach der Erfassung verfeinern Tracking-Schleifen kontinuierlich die Zeit- und Frequenzschätzungen. Stabiles Tracking ist entscheidend, um die Verbindung zu Satelliten aufrechtzuerhalten und genaue Pseudoentfernungsmessungen unter wechselnden Signalbedingungen zu unterstützen.
Tracking-Schleifen umfassen Delay-Locked-Loops (DLL) für die Code-Verfolgung und Phase-Locked-Loops (PLL) oder Frequency-Locked-Loops (FLL) für die Trägerverfolgung. Diese Schleifen müssen Rauschleistung und dynamisches Verhalten ausbalancieren, um einen stabilen Betrieb während Empfängerbewegung oder Signalschwund aufrechtzuerhalten.
Navigationslösung
Die Navigations-Engine berechnet Position, Geschwindigkeit und Zeit basierend auf Pseudoentfernungsmessungen von mehreren Satelliten. Mindestens vier Satelliten sind erforderlich, um die dreidimensionale Position und den Empfängeruhroffset zu bestimmen.
Pseudoentfernungen repräsentieren die gemessene Entfernung zwischen Satellit und Empfänger, einschließlich des Empfängeruhrfehlers. Die Navigations-Engine löst ein Gleichungssystem, das Satellitenpositionen, Pseudoentfernungen und Empfängerposition in Beziehung setzt, unter Verwendung iterativer Algorithmen oder Kalman-Filtertechniken.
Die Positionsgenauigkeit hängt von der Satellitengeometrie, atmosphärischen Verzögerungen, Mehrwegeausbreitung und Empfängerrauschen ab. Typische Einzelfrequenz-Empfänger erreichen eine Genauigkeit von 3–5 Metern unter freiem Himmel. Fortgeschrittene Empfänger mit Dual-Frequency-Betrieb und mehreren Konstellationen können die Positionsgenauigkeit und Zuverlässigkeit erheblich verbessern.
Erweiterte Funktionen
Multikonstellations-Verarbeitung
Moderne GNSS-Empfänger verarbeiten Signale mehrerer Satellitensysteme gleichzeitig und verbessern so die Satellitenverfügbarkeit und Positionierungsrobustheit. Durch die Kombination von GPS-, Galileo-, GLONASS- und BeiDou-Signalen erhöhen Empfänger die Anzahl sichtbarer Satelliten, insbesondere in anspruchsvollen Umgebungen wie städtischen Schluchten oder unter Laubwerk.
Der Multikonstellations-Betrieb erhöht auch die Widerstandsfähigkeit gegen lokale Signalabschattung und bietet Redundanz, falls ein System Dienstunterbrechungen erfährt. Die Nutzung mehrerer Konstellationen ist für bestimmte Anwendungen zunehmend verpflichtend, wie beispielsweise europäische eCall-Systeme, die Galileo-Unterstützung erfordern.
Dual-Frequency-Betrieb
Dual-Frequency-Empfänger verarbeiten Signale auf zwei Frequenzbändern (typischerweise L1/E1 und L5/E5), um ionosphärische Verzögerungsfehler zu eliminieren. Durch den Vergleich der Signallaufzeiten über verschiedene Frequenzen kann der Empfänger ionosphärische Verzerrungen berechnen und entfernen, wodurch die Positionsgenauigkeit erheblich verbessert wird, ohne externe Korrekturdaten zu benötigen.
Diese Fähigkeit ist besonders wertvoll in Umgebungen mit hoher ionosphärischer Aktivität oder für Anwendungen, die unabhängig von atmosphärischen Bedingungen eine konsistente Genauigkeit erfordern.
Koexistenz und Integrationsaspekte
GNSS-Empfänger werden häufig in Geräte integriert, die auch Mobilfunk-, WLAN-, Bluetooth- oder UWB-Funkgeräte enthalten. Sorgfältiges HF-Design ist erforderlich, um eine Desensibilisierung durch nahegelegene Sender zu vermeiden, insbesondere wenn GNSS-Antennen und Frontend-Komponenten in unmittelbarer Nähe zu aktiven Funkgeräten platziert werden.
Wichtige Integrationsherausforderungen umfassen:
- Außerband-Störungen: Starke Sender in benachbarten Frequenzbändern (z.B. LTE Band 1 bei 2100 MHz) können Harmonische oder Intermodulationsprodukte erzeugen, die in GNSS-Bänder fallen
- Frontend-Überlastung: Hochleistungsübertragungen können den GNSS-LNA sättigen und die Empfindlichkeit reduzieren, selbst wenn das störende Signal außerhalb des Bandes liegt
- Antennenkopplung: Unzureichende Isolation zwischen GNSS- und anderen Funkantennen kann zu direkter Kopplung störender Signale führen
Strategien zur Störungsminderung umfassen räumliche Trennung von Antennen, Frequenzplanung, zeitbasiertes Blanking während Sendephasen und adaptive Filterung im digitalen Bereich. Tests zur Koexistenz-Performance sind entscheidend, um einen zuverlässigen GNSS-Betrieb in realen Einsatzszenarien sicherzustellen.
→ Leistungsvalidierung und Konformitätsprüfungen adressieren diese Integrationsherausforderungen durch kontrollierte Messszenarien. Siehe GNSS-Empfängerprüfung für detaillierte Anleitungen zu Bewertungsmethoden und regulatorischen Anforderungen.
Leistungsparameter und Testmetriken
Die Leistungsfähigkeit von GNSS-Empfängern wird dadurch bestimmt, wie zuverlässig Satellitensignale erfasst, verfolgt und in präzise Positions-, Geschwindigkeits- und Zeitinformationen umgesetzt werden. Aufgrund der extrem niedrigen Signalpegel ist eine Bewertung nur anhand klar definierter und reproduzierbarer Metriken sinnvoll.
Die folgenden Parameter werden typischerweise zur Charakterisierung der GNSS-Empfängerleistung in Anwendungen wie Automotive-Systemen, IoT-Tracking-Geräten und sicherheitsrelevanten Positionierungsfunktionen herangezogen.
Empfindlichkeit
Die Empfindlichkeit beschreibt den minimalen Signalpegel, bei dem ein GNSS-Empfänger Satellitensignale erfolgreich erfassen oder verfolgen kann.
Es werden in der Regel zwei Kennwerte unterschieden:
Erfassungsempfindlichkeit (Acquisition Sensitivity)
Niedrigster Signalpegel, bei dem ein Satellit erkannt und ein initialer Positionsfix erreicht werden kann.Verfolgungsempfindlichkeit (Tracking Sensitivity)
Niedrigster Signalpegel, bei dem ein bereits erfasstes Satellitensignal stabil verfolgt werden kann.
Die Verfolgungsempfindlichkeit liegt meist mehrere Dezibel unter der Erfassungsempfindlichkeit und ist entscheidend für den Betrieb in signalgedämpften Umgebungen, etwa in urbanen Schluchten, in Gebäudenähe oder unter Vegetation.
Time to First Fix (TTFF)
Time to First Fix beschreibt die Zeit, die ein GNSS-Empfänger benötigt, um nach dem Einschalten oder Zurücksetzen erstmals eine gültige Positionslösung zu berechnen.
Der TTFF hängt stark vom Zustand des Empfängers und den verfügbaren Hilfsdaten ab:
Cold Start
Keine gültigen Almanach-, Ephemeriden- oder Positionsdaten verfügbar; typischer TTFF: 30–60 Sekunden.Warm Start
Almanachdaten und ungefähre Position verfügbar, Ephemeriden veraltet; TTFF meist wenige Sekunden.Hot Start
Gültige Ephemeriden und aktuelle Positionsdaten verfügbar; Positionsfix in ein bis zwei Sekunden.
Der TTFF ist ein zentraler Leistungsindikator für die Nutzererfahrung und für Anwendungen, die nach dem Einschalten eine schnelle Positionsbestimmung erfordern.
Positionsgenauigkeit
Die Positionsgenauigkeit beschreibt die Abweichung zwischen der vom Empfänger berechneten Position und der tatsächlichen Position. Sie wird üblicherweise als horizontaler und vertikaler Fehler unter definierten Testbedingungen angegeben.
Die Genauigkeit wird von mehreren Faktoren beeinflusst, darunter:
Satellitengeometrie (Dilution of Precision)
Atmosphärische Verzögerungen (Ionosphäre und Troposphäre)
Mehrwegeausbreitung
Empfängerrauschen und Signalverarbeitungsalgorithmen
Unter Freifeldbedingungen erreichen Einzelfrequenz-Empfänger typischerweise horizontale Genauigkeiten im Bereich weniger Meter. Mehrkonstellations- und Dual-Frequency-Empfänger können Genauigkeit und Robustheit insbesondere in anspruchsvollen Umgebungen deutlich verbessern.
Robustheit und Störfestigkeit
Die Robustheit beschreibt die Fähigkeit eines GNSS-Empfängers, die Positionsbestimmung auch bei Signalbeeinträchtigungen aufrechtzuerhalten.
Relevante Aspekte sind unter anderem:
Widerstandsfähigkeit gegenüber In-Band- und Außerband-Störungen
Toleranz gegenüber benachbarten Funkübertragern im selben Gerät
Stabilität unter dynamischen Bedingungen wie Fahrzeugbewegung oder Signalschwund
Die Störfestigkeit ist besonders wichtig für integrierte Geräte, die GNSS mit Mobilfunk, WLAN oder anderen Funktechnologien kombinieren.
Test- und Validierungsmethoden
Die Prüfung von GNSS-Empfängern konzentriert sich auf die Verifikation von Leistungsparametern unter kontrollierten und reproduzierbaren Bedingungen. Da GNSS-Signale extrem schwach sind und Umwelteinflüsse in realen Szenarien nicht kontrolliert werden können, ist laborbasierte Prüfung für eine zuverlässige Leistungsvalidierung und Konformitätsbewertung unerlässlich.
Die Auswahl der Prüfmethoden richtet sich nach Entwicklungsstand, Anwendungskontext und regulatorischen Anforderungen.
Simulatorbasierte Tests
GNSS-Simulatoren erzeugen realistische Satellitensignale und ermöglichen eine präzise Kontrolle von Signalparametern, Satellitengeometrie und Umgebungsbedingungen. Dadurch lassen sich reproduzierbare Tests durchführen, die mit Live-Sky-Messungen nicht erreichbar sind.
Typische simulatorbasierte Testszenarien sind:
Definierte Satellitensichtbarkeit und -geometrie
Einstellbare Signalpegel zur Empfindlichkeitsbewertung
TTFF-Messungen für Cold, Warm und Hot Start
Dynamische Szenarien mit konfigurierbaren Bewegungsprofilen
Mehrkonstellations- und Mehrfrequenzbetrieb
Simulatorbasierte Tests sind die bevorzugte Methode für Leistungscharakterisierung, Regressionstests und zertifizierungsnahe Messungen.
Live-Sky-Tests
Live-Sky-Tests nutzen reale Satellitensignale, die über eine Antenne in einer Außenumgebung empfangen werden. Sie bilden reale Betriebsbedingungen ab, bieten jedoch nur eingeschränkte Reproduzierbarkeit und Kontrolle.
Live-Sky-Tests werden typischerweise eingesetzt für:
Funktionale Verifikation während der Entwicklung
Feldvalidierung integrierter Geräte
Bewertung der Nutzererfahrung
Aufgrund unkontrollierbarer Variablen wie Satellitengeometrie, Störungen und Wetterbedingungen eignen sich Live-Sky-Tests nicht als alleinige Grundlage für Leistungsvalidierung oder Konformitätsnachweise.
Empfindlichkeits- und TTFF-Bewertung
Messungen der Empfindlichkeit und der Time to First Fix (TTFF) werden üblicherweise mit GNSS-Simulatoren durchgeführt, um konsistente und vergleichbare Ergebnisse zu erzielen.
Typische Vorgehensweisen sind:
Schrittweise Signaldämpfung zur Bestimmung von Erfassungs- und Verfolgungsschwellen
Definierte Startbedingungen für Cold, Warm und Hot Start
Verifikation über unterstützte Konstellationen und Frequenzbänder hinweg
Diese Messungen stehen in direktem Zusammenhang mit den zuvor beschriebenen Leistungsparametern.
Störfestigkeits- und Robustheitstests
Robustheitstests bewerten die Empfängerleistung unter Signalbeeinträchtigungen und Störeinflüssen.
Relevante Prüfungen umfassen:
Einbringung von In-Band- und Außerband-Störungen
Koexistenzszenarien mit benachbarten Funkübertragern
Simulation von Signalabschattung und Fading
Dynamische Belastungstests unter Bewegung und Leistungsvariation
Diese Tests sind besonders wichtig für Geräte, die GNSS mit Mobilfunk, WLAN oder anderen Funktechnologien kombinieren.
Konformitätsorientierte Tests
Für bestimmte Anwendungen und Märkte müssen GNSS-Empfänger die Einhaltung definierter Leistungs- und Emissionsanforderungen nachweisen.
Beispiele hierfür sind:
Leistungsvalidierung gemäß ETSI EN 303 413 für den europäischen Markt
Verifikation von Empfängerblockierung und Störaussendungen
Dokumentation von Prüfbedingungen, Messunsicherheiten und Reproduzierbarkeit
Konformitätsorientierte Prüfungen bauen auf simulatorbasierten Messungen auf und erfordern nachvollziehbare, sauber dokumentierte Prüfverfahren.
Regulatorische und anwendungsspezifische Anforderungen
GNSS-Empfänger sind passive Funkgeräte und senden selbst keine Funksignale aus. Daher sind in den meisten Märkten weder individuelle Frequenzzuteilungen noch funktechnische Typgenehmigungen erforderlich.
Dennoch unterliegen GNSS-Empfänger regionalen regulatorischen Rahmenbedingungen, insbesondere in Bezug auf Funkanlagenrecht, elektromagnetische Verträglichkeit (EMV) und anwendungsspezifische Vorgaben. Darüber hinaus schreiben einige Märkte die Unterstützung bestimmter Satellitensysteme vor, etwa für sicherheitsrelevante Anwendungen oder national regulierte Einsatzbereiche.
Die nachfolgende Übersicht fasst zentrale regulatorische Aspekte zusammen, die für die Integration von GNSS-Empfängern und den globalen Marktzugang relevant sind.
| Region | Details |
|---|---|
| EU |
Regulatorischer Status: GNSS-Empfänger gelten als Funkanlagen im Sinne der Radio Equipment Directive (RED). Eine individuelle Funklizenz ist nicht erforderlich, jedoch ist die CE-Konformität verpflichtend, einschließlich effizienter Frequenznutzung und EMV-Konformität (z. B. ETSI EN 303 413). Nutzungseinschränkungen für GNSS: Keine Einschränkungen der GNSS-Nutzung; alle gängigen Systeme dürfen empfangen werden. Anwendungsspezifische Anforderungen: Verbindliche Galileo-Unterstützung für eCall-Systeme in Fahrzeugen; zunehmende Bedeutung von Galileo für Notrufdienste (z. B. E112/AML). |
| USA |
Regulatorischer Status: Passive GNSS-Empfänger benötigen keine FCC-Zertifizierung, sofern sie nicht absichtlich senden. Geräte müssen die Grenzwerte gemäß FCC Part 15 für unbeabsichtigte Aussendungen einhalten. Nutzungseinschränkungen für GNSS: Empfang von GPS und Galileo ausdrücklich zulässig. Der Empfang von GLONASS und BeiDou ist derzeit toleriert; es besteht kein formelles Verbot. Anwendungsspezifische Anforderungen: Keine verpflichtenden Multi-GNSS-Vorgaben für Verbrauchergeräte; regulatorischer Fokus liegt auf Emissionen und Störverhalten. |
| Kanada |
Regulatorischer Status: Vergleichbar mit den USA: Keine spezifische Funkzulassung für passive GNSS-Empfänger erforderlich. Geräte müssen allgemeine EMV-Anforderungen erfüllen (ICES-003). Nutzungseinschränkungen für GNSS: Keine Einschränkungen bei der Nutzung ausländischer GNSS-Systeme. Anwendungsspezifische Anforderungen: Keine verpflichtenden Konstellationsvorgaben; Multi-GNSS ist weit verbreitet. |
| Japan |
Regulatorischer Status: Reine GNSS-Empfänger benötigen keine Funkzertifizierung (Giteki). GNSS wird als passiver Empfang eingestuft. Nutzungseinschränkungen für GNSS: Keine Einschränkungen der GNSS-Nutzung; ausländische Systeme sind zulässig. Anwendungsspezifische Anforderungen: Das regionale QZSS-System wird breit unterstützt und häufig zusätzlich zu GPS und anderen GNSS genutzt. |
| China |
Regulatorischer Status: Für GNSS-Empfänger ist keine eigene Funklizenz erforderlich. Allgemeine EMV-Anforderungen gelten. Nutzungseinschränkungen für GNSS: Kein formelles Verbot für den Empfang von GPS, Galileo oder GLONASS. Anwendungsspezifische Anforderungen: BeiDou-Kompatibilität wird stark empfohlen und kann in öffentlichen oder staatlichen Anwendungen vorgeschrieben sein. |
| Russland |
Regulatorischer Status: Keine separate Funklizenz für GNSS-Empfänger erforderlich. Der Marktzugang setzt in der Regel eine EAC-Konformität des Gesamtgeräts voraus. Nutzungseinschränkungen für GNSS: Keine Einschränkungen der GNSS-Nutzung. Anwendungsspezifische Anforderungen: Verpflichtende GLONASS-Unterstützung für Navigationsgeräte im russischen Markt; erforderlich u. a. für ERA-GLONASS-Systeme. |
| Indien |
Regulatorischer Status: Keine individuelle Funkzulassung für GNSS-Empfänger erforderlich. Allgemeine EMV-Anforderungen gelten. Nutzungseinschränkungen für GNSS: Keine Einschränkungen für ausländische GNSS-Systeme. Anwendungsspezifische Anforderungen: NavIC-Unterstützung wird zunehmend verpflichtend, einschließlich angekündigter Anforderungen für Smartphones und bestimmte Navigationsanwendungen. |
| Weitere Märkte |
Regulatorischer Status: GNSS-Empfänger werden in der Regel als passive Funkgeräte behandelt und benötigen keine individuelle Lizenzierung. Nutzungseinschränkungen für GNSS: GNSS-Nutzung meist uneingeschränkt. Anwendungsspezifische Anforderungen: Lokale Systeme können gefördert werden; allgemeine EMV- und Produktsicherheitsanforderungen gelten. |
| Region | Regulatorischer Status von GNSS-Empfängern | Nutzungseinschränkungen für GNSS | Anwendungsspezifische Anforderungen |
|---|---|---|---|
| EU | GNSS-Empfänger gelten als Funkanlagen im Sinne der Radio Equipment Directive (RED). Eine individuelle Funklizenz ist nicht erforderlich, jedoch ist die CE-Konformität verpflichtend, einschließlich effizienter Frequenznutzung und EMV-Konformität (z. B. ETSI EN 303 413). | Keine Einschränkungen der GNSS-Nutzung; alle gängigen Systeme dürfen empfangen werden. | Verbindliche Galileo-Unterstützung für eCall-Systeme in Fahrzeugen; zunehmende Bedeutung von Galileo für Notrufdienste (z. B. E112/AML). |
| USA | Passive GNSS-Empfänger benötigen keine FCC-Zertifizierung, sofern sie nicht absichtlich senden. Geräte müssen die Grenzwerte gemäß FCC Part 15 für unbeabsichtigte Aussendungen einhalten. | Empfang von GPS und Galileo ausdrücklich zulässig. Der Empfang von GLONASS und BeiDou ist derzeit toleriert; es besteht kein formelles Verbot. | Keine verpflichtenden Multi-GNSS-Vorgaben für Verbrauchergeräte; regulatorischer Fokus liegt auf Emissionen und Störverhalten. |
| Kanada | Vergleichbar mit den USA: Keine spezifische Funkzulassung für passive GNSS-Empfänger erforderlich. Geräte müssen allgemeine EMV-Anforderungen erfüllen (ICES-003). | Keine Einschränkungen bei der Nutzung ausländischer GNSS-Systeme. | Keine verpflichtenden Konstellationsvorgaben; Multi-GNSS ist weit verbreitet. |
| Japan | Reine GNSS-Empfänger benötigen keine Funkzertifizierung (Giteki). GNSS wird als passiver Empfang eingestuft. | Keine Einschränkungen der GNSS-Nutzung; ausländische Systeme sind zulässig. | Das regionale QZSS-System wird breit unterstützt und häufig zusätzlich zu GPS und anderen GNSS genutzt. |
| China | Für GNSS-Empfänger ist keine eigene Funklizenz erforderlich. Allgemeine EMV-Anforderungen gelten. | Kein formelles Verbot für den Empfang von GPS, Galileo oder GLONASS. | BeiDou-Kompatibilität wird stark empfohlen und kann in öffentlichen oder staatlichen Anwendungen vorgeschrieben sein. |
| Russland | Keine separate Funklizenz für GNSS-Empfänger erforderlich. Der Marktzugang setzt in der Regel eine EAC-Konformität des Gesamtgeräts voraus. | Keine Einschränkungen der GNSS-Nutzung. | Verpflichtende GLONASS-Unterstützung für Navigationsgeräte im russischen Markt; erforderlich u. a. für ERA-GLONASS-Systeme. |
| Indien | Keine individuelle Funkzulassung für GNSS-Empfänger erforderlich. Allgemeine EMV-Anforderungen gelten. | Keine Einschränkungen für ausländische GNSS-Systeme. | NavIC-Unterstützung wird zunehmend verpflichtend, einschließlich angekündigter Anforderungen für Smartphones und bestimmte Navigationsanwendungen. |
| Weitere Märkte | GNSS-Empfänger werden in der Regel als passive Funkgeräte behandelt und benötigen keine individuelle Lizenzierung. | GNSS-Nutzung meist uneingeschränkt. | Lokale Systeme können gefördert werden; allgemeine EMV- und Produktsicherheitsanforderungen gelten. |
Zusammenfassung und praktische Implikationen
GNSS-Empfänger benötigen in der Regel keine individuellen Funklizenzen, müssen jedoch die jeweiligen regionalen Anforderungen an Funkanlagen und EMV erfüllen.
Regulatorische Vorgaben konzentrieren sich auf Emissionen, effiziente Frequenznutzung und die Konformität des Gesamtgeräts, nicht auf den Empfang der Satellitensignale selbst.
Anwendungsspezifische Vorgaben sind für den Marktzugang entscheidend, etwa die Galileo-Unterstützung für EU-eCall, GLONASS-Anforderungen in Russland oder NavIC-Vorgaben in Indien.
Hersteller sollten die unterstützten GNSS-Konstellationen klar dokumentieren und die Einhaltung regionaler Anwendungsanforderungen frühzeitig im Produktentwicklungsprozess prüfen.
Praktische Anwendungsbeispiele
Die Anforderungen an GNSS-Empfänger variieren je nach Anwendungskontext erheblich.
Obwohl die zugrunde liegende Positionierungstechnologie vergleichbar ist, unterscheiden sich Leistungserwartungen, regulatorische Rahmenbedingungen und Validierungsschwerpunkte je nach Branche.
Die folgenden Beispiele zeigen typische Einsatzszenarien und die jeweils relevanten technischen und regulatorischen Aspekte.
Automotive-Anwendungen
Im Automobilbereich ist GNSS eine sicherheits- und funktionskritische Komponente für Navigation, Flottenservices, Fahrerassistenzsysteme und Notruflösungen.
Typische Anwendungsfälle
Turn-by-Turn-Navigation und kartengestützte Dienste
Notrufsysteme (eCall / ERA-GLONASS)
Flottenverfolgung und Telematik
Unterstützung von Fahrerassistenzsystemen (ADAS)
Zentrale technische Anforderungen
Hohe Verfügbarkeit in urbanen Umgebungen und Tunneln
Schneller und zuverlässiger TTFF nach Fahrzeugstart
Robustes Tracking bei dynamischer Bewegung und Signalabschattung
Mehrkonstellationsunterstützung zur Verbesserung der Satellitensichtbarkeit
Regulatorischer und prüftechnischer Fokus
Verpflichtende Galileo-Unterstützung für EU-eCall-Systeme
GLONASS-Anforderungen für automotive Anwendungen in Russland
Leistungsvalidierung gemäß ETSI EN 303 413
Simulatorbasierte Tests für reproduzierbare sicherheitsrelevante Szenarien
Drohnen- und UAV-Anwendungen
GNSS spielt eine zentrale Rolle bei unbemannten Luftfahrzeugen (UAVs), insbesondere für Navigation, Stabilisierung, Geofencing und autonome Flugfunktionen.
Typische Anwendungsfälle
Positionshaltung und Wegpunktnavigation
Autonomer Flug und Return-to-Home-Funktionen
Geofencing und Einhaltung von Luftraumvorgaben
Vermessung, Kartierung und Inspektion
Zentrale technische Anforderungen
Hohe Positionsgenauigkeit und geringe Latenz
Zuverlässiger Betrieb bei hohen Dynamiken und schnellen Lageänderungen
Robustheit gegenüber Störungen durch Bordfunktechnik und Motoren
Mehrband- und Dual-Frequency-Unterstützung zur Genauigkeitssteigerung
Regulatorischer und prüftechnischer Fokus
Verifikation der GNSS-Leistung für flugsicherheitsrelevante Funktionen
Validierung unter dynamischen Bewegungsprofilen
Stör- und Koexistenztests mit HF-Sendern
Zunehmende Bedeutung von Dual-Frequency-GNSS bei professionellen UAVs
IoT- und Asset-Tracking-Anwendungen
In IoT-Geräten wird GNSS häufig für Tracking-, Logistik- und Monitoring-Anwendungen eingesetzt, oft unter strengen Vorgaben hinsichtlich Energieverbrauch und Baugröße.
Typische Anwendungsfälle
Asset- und Container-Tracking
Intelligente Logistik- und Lieferkettenüberwachung
Wildtier- und Nutztiertracking
Infrastrukturüberwachung und Zeitsynchronisation
Zentrale technische Anforderungen
Niedriger Energieverbrauch und effiziente Duty-Cycle-Konzepte
Zuverlässige Signalerfassung bei niedrigen Pegeln
Akzeptabler TTFF nach langen Schlafphasen
Kompakte Antennen- und HF-Frontend-Integration
Regulatorischer und prüftechnischer Fokus
Bewertung von Empfindlichkeit und Tracking-Leistung bei niedriger Leistungsaufnahme
Koexistenz mit Mobilfunk (LTE-M, NB-IoT) und LPWAN-Technologien
Validierung von Cold-Start-TTFF-Szenarien
Regionale Vorgaben, z. B. NavIC-Unterstützung für den indischen Markt
Anwendungsübergreifende Aspekte
Simulatorbasierte Tests ermöglichen eine konsistente Bewertung von Empfindlichkeit, TTFF und Genauigkeit
Mehrkonstellationsunterstützung erhöht die Robustheit in anspruchsvollen Umgebungen
Regulatorische Anforderungen beeinflussen zunehmend die Auswahl unterstützter GNSS-Konstellationen
Integrationstests sind essenziell, wenn GNSS gemeinsam mit anderen Funktechnologien betrieben wird
GNSS-Anwendungsvergleich
| Aspekt | Details |
|---|---|
| Automotive |
Primärer Anwendungsfall: Navigation, eCall, Telematik Leistungspriorität: Verfügbarkeit und Robustheit Typische GNSS-Konfiguration: Mehrkonstellation, zunehmend Dual-Frequency TTFF-Relevanz: Mittel bis hoch Störempfindlichkeit: Hoch (Koexistenz mit Mobilfunk) Regulatorischer Fokus: RED, EN 303 413, eCall-Vorgaben |
| Drohnen / UAV |
Primärer Anwendungsfall: Flugsteuerung, Positionierung, Geofencing Leistungspriorität: Genauigkeit und dynamisches Verhalten Typische GNSS-Konfiguration: Mehrkonstellation, Dual-Frequency verbreitet TTFF-Relevanz: Hoch (sicherheitsrelevant) Störempfindlichkeit: Hoch (Bord-HF und Motoren) Regulatorischer Fokus: Betriebssicherheit, Luftraumvorgaben |
| IoT / Asset Tracking |
Primärer Anwendungsfall: Asset-Tracking, Logistik, Monitoring Leistungspriorität: Energieeffizienz und Empfindlichkeit Typische GNSS-Konfiguration: Einzel- oder Mehrkonstellation, häufig Einzelfrequenz TTFF-Relevanz: Hoch nach langen Schlafzyklen Störempfindlichkeit: Mittel bis hoch (Koexistenz mit zellulären LPWANs) Regulatorischer Fokus: Regionale Marktvorgaben (z. B. NavIC) |
| Aspekt | Automotive | Drohnen / UAV | IoT / Asset Tracking |
|---|---|---|---|
| Primärer Anwendungsfall | Navigation, eCall, Telematik | Flugsteuerung, Positionierung, Geofencing | Asset-Tracking, Logistik, Monitoring |
| Leistungspriorität | Verfügbarkeit und Robustheit | Genauigkeit und dynamisches Verhalten | Energieeffizienz und Empfindlichkeit |
| Typische GNSS-Konfiguration | Mehrkonstellation, zunehmend Dual-Frequency | Mehrkonstellation, Dual-Frequency verbreitet | Einzel- oder Mehrkonstellation, häufig Einzelfrequenz |
| TTFF-Relevanz | Mittel bis hoch | Hoch (sicherheitsrelevant) | Hoch nach langen Schlafzyklen |
| Störempfindlichkeit | Hoch (Koexistenz mit Mobilfunk) | Hoch (Bord-HF und Motoren) | Mittel bis hoch (Koexistenz mit zellulären LPWANs) |
| Regulatorischer Fokus | RED, EN 303 413, eCall-Vorgaben | Betriebssicherheit, Luftraumvorgaben | Regionale Marktvorgaben (z. B. NavIC) |
Während die obige Tabelle die Unterschiede der GNSS-Anforderungen in Automotive-, Drohnen- und IoT-Anwendungen verdeutlicht, stehen Hersteller bei der Vorbereitung ihrer Produkte für globale Märkte häufig vor wiederkehrenden praktischen Fragestellungen.
Die folgende FAQ adressiert typische Themen rund um regulatorische Einordnung, Zertifizierungspflichten, Unterstützung von GNSS-Konstellationen sowie prüftechnische Erwartungen an GNSS-Empfänger.
FAQ – GNSS-Empfänger und Marktzugang
Benötigen GNSS-Empfänger eine Funkzulassung?
GNSS-Empfänger sind passive Geräte und benötigen in der Regel keine individuellen Frequenzlizenzen oder senderbezogenen Funkzulassungen. GNSS-fähige Produkte unterliegen jedoch weiterhin allgemeinen regulatorischen Rahmenbedingungen, insbesondere in Bezug auf EMV, Produktsicherheit und unbeabsichtigte Emissionen.
Wie werden GNSS-Empfänger in wichtigen Märkten wie der EU und den USA reguliert?
In der Europäischen Union gelten GNSS-Empfänger als Funkanlagen im Sinne der Radio Equipment Directive (RED). Sie müssen eine CE-Konformität nachweisen, einschließlich EMV-Konformität und – für bestimmte Anwendungen – der Einhaltung von ETSI EN 303 413.
In den Vereinigten Staaten benötigen reine GNSS-Empfänger in der Regel keine FCC-Zertifizierung. Geräte müssen jedoch die Grenzwerte nach FCC Part 15 für unbeabsichtigte Störaussendungen einhalten.
Gibt es Einschränkungen bei der Nutzung bestimmter GNSS-Konstellationen?
In den meisten Märkten ist der Empfang mehrerer GNSS-Konstellationen wie GPS, Galileo, GLONASS und BeiDou zulässig. Für bestimmte Anwendungen gelten jedoch verpflichtende Vorgaben, etwa die Galileo-Unterstützung für europäische eCall-Systeme oder NavIC-Anforderungen für ausgewählte Produkte im indischen Markt.
Unterliegen GNSS-Empfänger EMV- und Störfestigkeitsprüfungen?
Ja. Auch wenn GNSS-Empfänger selbst keine Sender sind, muss das Gesamtgerät die geltenden EMV-Grenzwerte einhalten und eine ausreichende Störfestigkeit nachweisen. Dies ist insbesondere relevant bei der Integration mit Mobilfunk-, WLAN- oder anderen Funktechnologien.
Ist simulatorbasierte Prüfung für GNSS-Empfänger erforderlich?
Simulatorbasierte Prüfungen sind nicht in allen Fällen rechtlich vorgeschrieben, stellen jedoch die bevorzugte Methode zur Leistungsvalidierung dar. GNSS-Simulatoren ermöglichen kontrollierte und reproduzierbare Prüfungen von Empfindlichkeit, TTFF, Genauigkeit und Robustheit, die mit Live-Sky-Messungen allein nicht zuverlässig abgedeckt werden können.
Wann sollte GNSS-Konformität im Produktentwicklungsprozess berücksichtigt werden?
GNSS-Konformität und Leistungsvalidierung sollten frühzeitig in der Entwicklungsphase adressiert werden. Antennendesign, HF-Koexistenz und die Auswahl unterstützter GNSS-Konstellationen beeinflussen sowohl die Performance als auch die regulatorische Konformität des Produkts maßgeblich.
GNSS-Empfängertests und Leistungsvalidierung
Unsere akkreditierten Prüflabore unterstützen die Bewertung von GNSS-Empfängern mittels kontrollierter Signalsimulation, Leistungsprüfungen und konformitätsorientierter Messungen. Dazu zählen Empfindlichkeit, TTFF, Positionsgenauigkeit, Störfestigkeit sowie anwendungsspezifische Anforderungen für Automotive- und IoT-Geräte.
Quellen und weiterführende Informationen
Ausgewählte GNSS-Regularien und technische Referenzen
-
ETSI EN 303 413 (EU)
Leistungsanforderungen für GNSS-Empfänger unter der Radio Equipment Directive (RED), einschließlich Receiver Blocking und Störaussendungen. Quelle: ETSI (PDF)
-
Radio Equipment Directive (2014/53/EU)
Rechtlicher Rahmen für das Inverkehrbringen von Funkanlagen auf dem europäischen Markt, einschließlich GNSS-Empfängern. Quelle: Official Journal of the European Union
-
ETSI EN 301 489-1
Grundlegender EMV-Standard für Funkanlagen, anwendbar auf GNSS-fähige Geräte. Quelle: ETSI (PDF)
-
47 CFR §15.109 / §15.107 (FCC - USA)
Grenzwerte für gestrahlte und leitungsgebundene Störaussendungen digitaler Geräte mit GNSS-Empfängern. Quelle: eCFR
-
FCC Part 15 (Unintentional Radiators)
Emissionsgrenzwerte für GNSS-fähige Geräte ohne beabsichtigte Funksender. Quelle: eCFR
GNSS-Systemreferenzen
-
European GNSS Service Centre (EUSPA)
Offizielle Informationen zu Galileo-Diensten, Leistungsmerkmalen und anwendungsspezifischen Anforderungen. Quelle: gsc-europa.eu
-
GPS Interface Specification (IS-GPS)
Öffentliche technische Spezifikationen zu GPS-Signalstrukturen und Leistungsparametern. Quelle: gps.gov
Zusätzliche Ressource
-
TAMSys von IB-Lenhardt AG – Type Approval Management System
Zentrale Compliance-Plattform zur Verwaltung von Funkzulassungen, regulatorischen Daten und Zertifikatsnachverfolgung in wichtigen Märkten – darunter die EU, die USA, Kanada und weitere. → TAMSys – Type Approval Management System
Dies ist eine kuratierte Auswahl zentraler regulatorischer und technischer Referenzen. GNSS-Empfänger unterliegen im Vergleich zu aktiven Funksendern weniger formalisierten Normen. Hersteller sollten die jeweils geltenden Anforderungen stets mit den zuständigen Behörden sowie anwendungsspezifischen Regelwerken abgleichen. Alle Referenzen wurden mit Stand Januar 2026 geprüft.
Autor: Daniel Lenhardt - CEO & Owner | IB-Lenhardt AG Feedback zu diesem Artikel geben